Marta Molinas
Om
Project proposals for ITK 2025-2026 (Molinas)
All available projects are based on a new low-density EEG concept, FlexEEG, designed for EEG source imaging, signal analysis, and AI-based classification, as described below:
David vs. Goliath – FlexEEG: A novel approach to reduced-channel EEG systems with brain imaging capabilities.
This project is the foundation for all sub-projects offered by my team. It is a multidisciplinary project in collaboration with the Kavli Institute for Systems Neuroscience, the NTNU Developmental Neuroscience Laboratory, the Department of Computer Science, the Juntendo University, Japan, the RIKEN Center for Brain Science, Japan, the International Institute of Integrative Sleep Medicine (IIIS)-Human Sleep Lab of the University of Tsukuba, Japan, the Indian Institute of Technology Roorkee , Aalborg University and Aarhus University, Denmark.
All listed projects require two students.
Traditional EEG recordings use high-density wet electrodes (60+ channels) arranged in a regular scalp pattern, requiring gel for stable signals. This method is time-consuming, costly, and uncomfortable.
FlexEEG offers an alternative with reduced-channel, dry, wireless electrodes, demanding expertise in electronics, signal processing, inverse problem-solving, and system identification. Our team, including Master’s, PhD, and exchange students, is actively developing such solutions, leveraging backgrounds in electronics, AI, machine learning, and embedded technologies.
Below is an artistic representation of the FlexEEG concept.
We are currently developing an in-house EEG headset featuring flexible, wireless, dry electrodes designed to move across the scalp.
The primary supervisor for these projects is Marta Molinas (marta.molinas@ntnu.no).
List of Projects
1. TheAppleCatcher Game: A novel motor imagery BCI for hand rehabilitation

2. Why Some Thrive While Others Struggle: AI, Neuroimaging, and Neurofeedback for Mental Health and Resilience
3. From EEG electrodes in the scalp to images of the brain using AI.
4. FlexEEG in Human Sleep Research: within this project, 3 different topics are offered:
4.1 Rapid Eye Movement (REM) onset detection during REM sleep.
4.2 Automatic sleep stage classification based on minimally invasive EEG.
4.3 Dream_ID: Automatic dream emotion recognition during REM sleep based on minimally invasive EEG.
5. Mind Wandering and Brain Network Transitions in Meditation: Insights from FlexEEG
6. FlexEEG decoding of hand movement intention
7. FlexEEG headset prototype development: Within this project, 2 different topics are offered:
7.1 Design and control of a robotic system for EEG measurements
7.2 EEG signal quality analysis with moving electrodes
8. Design of an EEG based communication system for patients with Locked-in Syndrome.
9. Flying a Drone with your Mind: FlexEEG motor imagery
10. FlexEEG based BCI system for ADHD Neurofeedback
11. FlexEEG based Lie Detector
12. FlexEEG based Biometric System for Subject Identification
13.The Augmented Human: Developing a BCI for RGB based automation
14. FlexEEG based Alcohol Detector for drivers
15. Prediction of Epileptic seizures with AI integrated FlexEEG.
16. FlexEEG for BabyBCI
17. Combining EEG and motion capture in immersive VR environment
Description of Projects
1. The AppleCatcher Game: A novel motor imagery BCI for hand rehabilitation
This project will further develop a new BCI framework for studying cortical activation during imagined hand movements. The framework will serve as a foundation for integrating adaptive neuromodulation into post-stroke rehabilitation therapies.
An initial demonstration of this concept can be seen in the The AppleCatcher Game video, while the proof of concept developed by previous students is available at BCI Workshop 2025.
The existing codebase will be provided as a starting point for future development and improvements.
Main supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-supervisor: Amita Giri, amita.giri@ece.iitr.ac.in
2. Why Some Thrive While Others Struggle: AI, Neuroimaging, and Neurofeedback for Mental Health and Resilience
This project aims to uncover the behavioral and neurocognitive mechanisms underlying stress and resilience, exploring why some individuals develop mood disorders while others remain resilient. By integrating neuroimaging methods with machine learning, the project seeks to identify brain networks associated with emotional well-being and develop targeted interventions.
In addition to mapping resilience-related brain activity, this project will explore neurofeedback-based interventions as a potential tool for enhancing emotional regulation. Neurofeedback training, which enables individuals to modulate their brain activity in real-time, could provide a novel approach to strengthening resilience and preventing mental health disorders.
The student will collaborate with the Ziaei group at the Kavli Institute for Systems Neuroscience and will be involved in:
- Analyzing MRI data to determine which brain networks are linked to psychopathology in both healthy and depressed individuals.
- Measuring how the functional activity of large-scale networks contributes to emotional well-being.
- Developing explainable machine learning methods to predict mental disorders and identify key diagnostic regions.
- Exploring the potential for neurofeedback interventions to enhance resilience by training individuals to regulate their own brain activity.
This project offers a unique opportunity to combine cutting-edge neuroscience, AI, and real-world applications in mental health intervention.
This project will require two students, one from Cybernetics and one from the Kavli Institute to cooperate in this transdisciplinary task.
Main supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-supervisor: Prof. Maryam Ziaei, maryam.ziaei@ntnu.no, Kavli Institute for Systems Neuroscience
3. From EEG electrodes in the scalp to images of the brain using AI.
AI is revolutionizing many research fields including EEG neurophysiological measurements and signal analysis. In this project, the aim is to involve novel AI methods in an estimation process called EEG source imaging (ESI). ESI refers to the estimation of the source activity inside the brain by using the EEG signals registered at scalp and brain models based on anatomical measurements (e.g. MRI). The estimated source activity can provide important information like the location of the activity, the dispersion of the activity, the interaction of brain areas, among other properties. This information can be used to improve brain-computer interfaces performance, better understanding of the dynamics of the brain and relationships of brain areas, and localize the foci of epileptic activity.
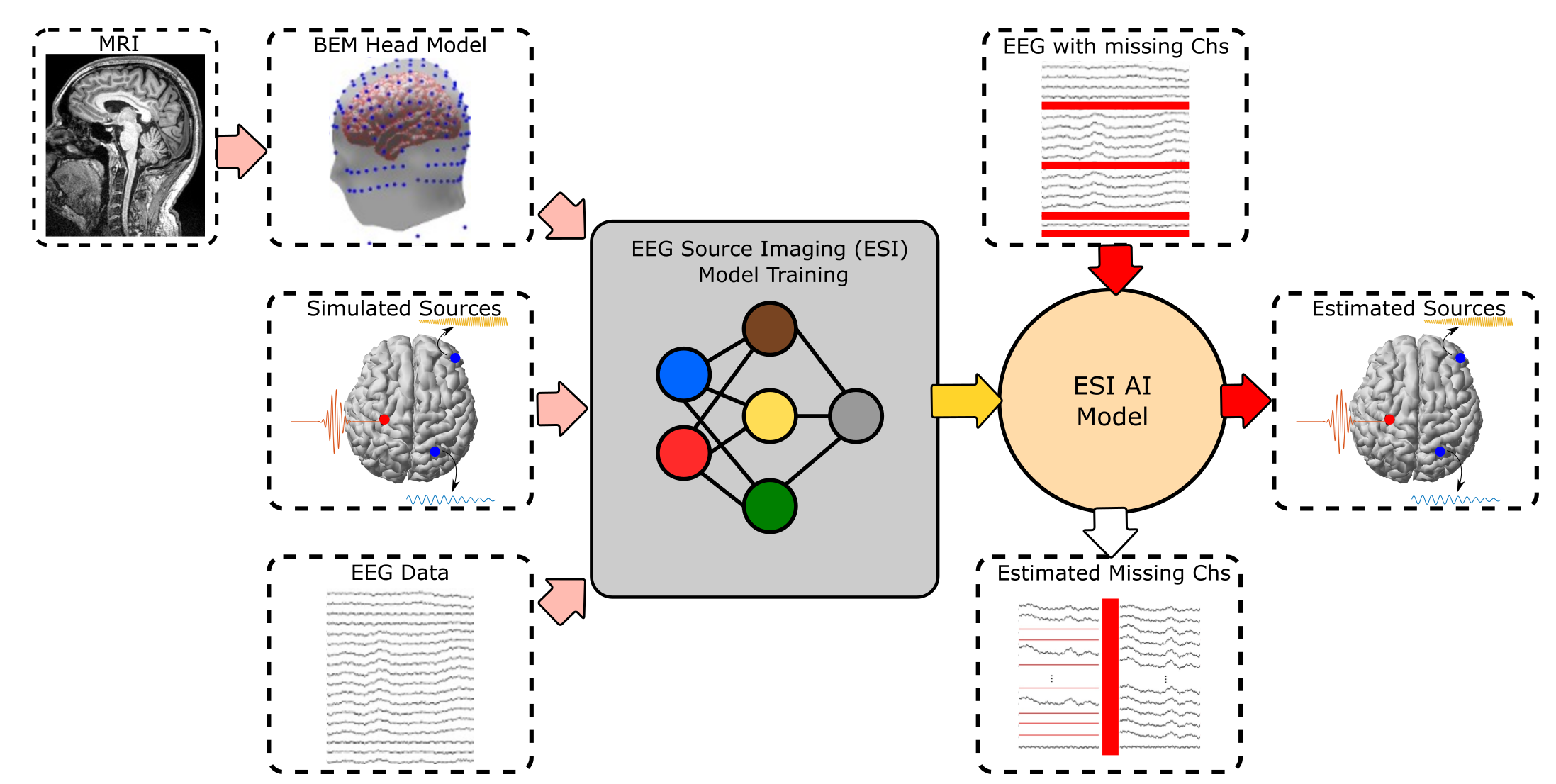
This project seeks to explore the implementation of new ESI methods based on deep learning and advanced simulation methods for source activity. The students in this project will perform advanced simulation of brain activity and explore/create cutting-edge models to compare their performance using a simulated ground-truth. Finally, evaluations using real datasets will be performed to score the developed deep learning-based ESI methods.
This project will require two students, it will be in collaboration with the Indian Institute of Technology Roorkee, India
Supervisor at NTNU: Marta Molinas, marta.molinas@ntnu.no
Supervisor at IIT Roorkee: Dr Amita Giri
4. FlexEEG in Human Sleep Research: within this project, 3 different topics are offered:
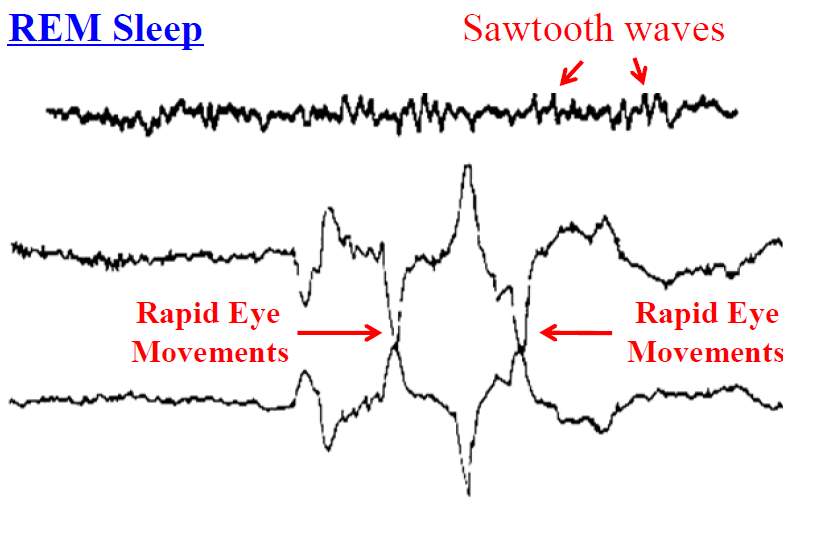
4.1 Rapid Eye Movement (REM) onset detection during REM sleep.
REM and NREM sleep studies have revealed much about the physiology of sleep and its disorders and about the pathophysiology of mental illness. Electrooculography (EOG) is used in Polysomnography (PSG) studies to capture the electrical activity generated by the human eye, which could be regarded to behave like an electric dipole, having the positive and negative poles at the cornea and retina respectively. Phasic REM sleep parameters include the number and incidence of rapid eye movements. This project will use EOG signals from PSG studies to detect the exact number and timing of rapid eye movements during REM sleep. The algorithm will be implemented by modelling the peak-gradient relationship and duration of the movements in EOG signals starting with the parameters proposed in [1]. In general, human physiological signals are qualitatively similar but not quantitatively identical. For example, a sawtooth wave (STW) is one of the characteristic EEG patterns of REM sleep. However, the density, duration, and frequency of STWs are individually dependent. The algorithm will focus on solving the problem of interpersonal EOG variability in order to make it more sensitive to these differences.
This project will be in collaboration with the IIIS Human Sleep Lab of the University of Tsukuba, from where the sleep data will be obtained. The EEG ITK team is currently collaborating with the Human Sleep lab in several other projects related to sleep and sleep data is already available to initiate the project. The student in this topic will collaborate with the student in Topic 3.
[1] Kazumi Takahashi and Yoshikata Atsumi, Sleep and Sleep States, Precise Measurement of Individual Rapid Eye Movements REM Sleep of Humans. Sleep, 20(9):743-752, 1997 American Sleep Disorders Association and Sleep Research Society
A basic software developed by a previous student will serve as starting point for this project.
Main supervisor: Marta Molinas, marta.molinas@ntnu.no
Contact person in Japan: Takashi Abe, IIIS- University of Tsukuba
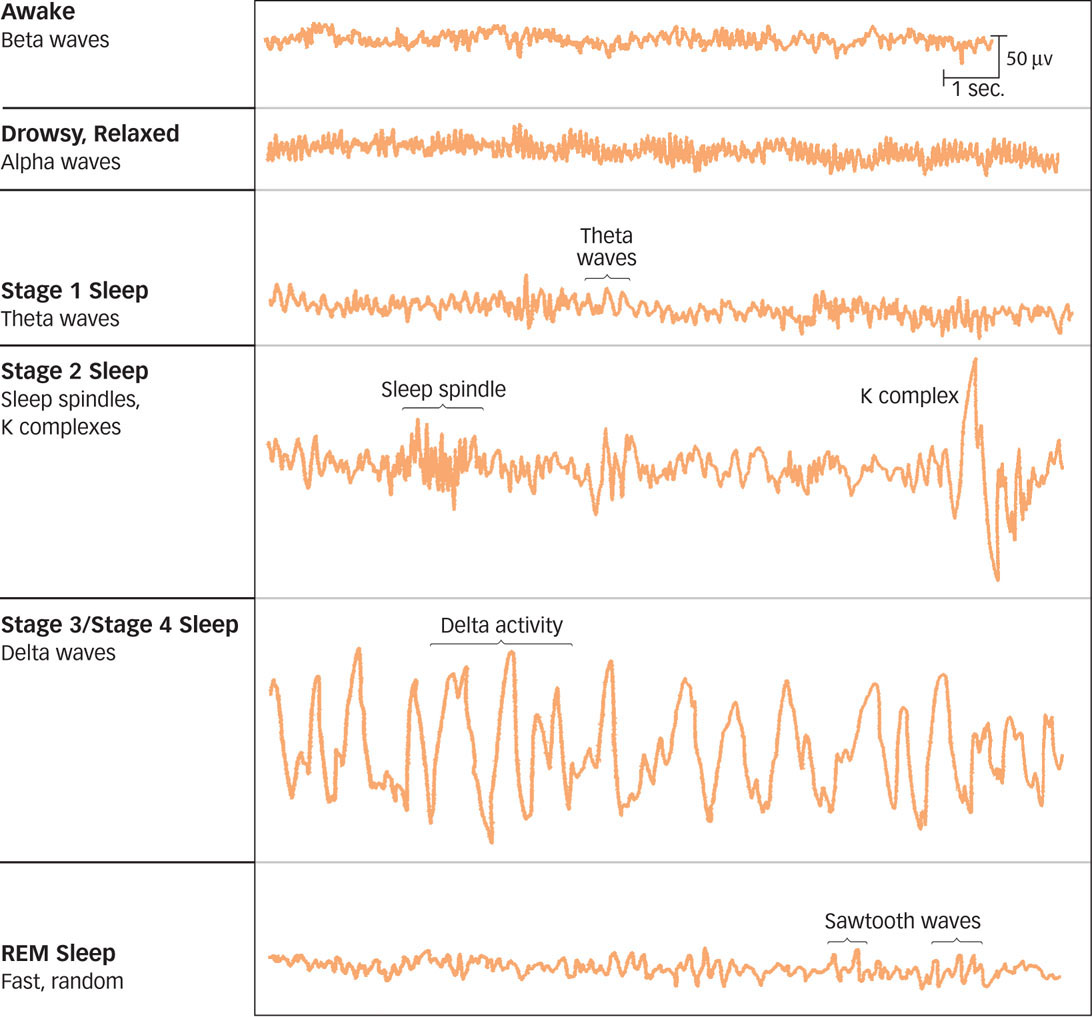
4.2 Automatic sleep stage classification based on minimally invasive EEG.
Sleep staging is a process typically performed by sleep experts and is a tedious and lengthy task, during which labels are manually assigned to polysomnographic (PSG) recording epochs. In order to reduce the time and effort required to accomplish this, a large number of automatic sleep staging methodologies have been developed. This is typically achieved through a series of steps which in general include: signal pre-processing, feature extraction and classification. The methods used for each of these steps vary greatly among the proposed approaches, with the final result providing varying degrees of accuracy. In this project, the students will develop a pipeline for sleep staging using data obtained from the IIIS Human Sleep Lab of the University of Tsukuba.
The project will be focused on the use of a single type of signal (EEG) and reduced electrode count, as these can potentially provide minimally invasive sleep monitoring solutions. The sleep stage classification will be conducted following widely accepted rules i.e., American Academy of Sleep Medicine (AASM) and Rechtschaffen & Kales (R&K) rules.
This project will be in collaboration with the IIIS Human Sleep Lab of the University of Tsukuba, from where the sleep data will be obtained. The EEG ITK team is currently collaborating with the Human Sleep lab in several other projects related to sleep and sleep data is already available to initiate the project.
A basic software developed by a previous student will serve as starting point for this project.
Main supervisor: Marta Molinas
Co-supervisor: Dr Luis Alfredo Moctezuma, luis.a.moctezuma@gmail.com
Contact person in Japan: Prof. Takashi Abe, IIIS- University of Tsukuba
4.3 DreamID: Automatic dream emotion recognition during REM sleep based on minimally invasive EEG.
Every day, our emotional states influence our behavior, decisions, relationships and health condition. Affective states play an essential role in decision-making, they can facilitate or hinder problem-solving. Emotion self-awareness can help people manage their mental health and optimize their work performance. Automatic detection of emotion dimensions can increase our understanding of emotions and promote effective communication among individuals and human-to-machine information exchanges. Besides, automatic emotion recognition will play an essential role in emotion monitoring in health-care facilities (The WHO estimates that depression, as an emotional disorder, will soon be the second leading cause of the global burden of disease), gaming and entertainment, teaching-learning scenarios, optimizing performance in the workplace, and in artificial intelligence entities designed for human interaction.
To decode EEG signals and relate them to specific emotion is a complex problem. Affective states do not have a simple mapping with specific brain structures because different emotions activate the same brain locations, or conversely, a single emotion can activate several brain structures. A neural model of human emotions would be beneficial for building an emotion recognition system and developing applications in emotion understanding and management.
The objective of this project is to develop neural models that can decode human emotions through EEG signal analysis by learning from training data from experiments designed for emotion elicitation. The process will involve signal analysis, pre-processing, feature extraction and selection, design of classification algorithms and performance evaluation.
This project will be in collaboration with the International Institute of Integrative Sleep Medicine of the University of Tsukuba (Japan).

Main Supervisors: Marta Molinas
Co-supervisors: Dr Luis Alfredo Moctezuma, luis.a.moctezuma@gmail.com
Contact person in Japan: Prof. Takashi Abe, IIIS, University of Tsukuba
5. Mind Wandering and Brain Network Transitions in Meditation: Insights from FlexEEG
Mindfulness, a form of meditation defined by present moment awareness, has shown to be effective in treating various mental disorders with remarkably modest hours of practice (ca. 30 hours). A possible neural mechanism by which mindfulness training improves mental health is the altered activity of a brain network called default mode network (DMN). DMN activity is associated with task-irrelevant thoughts and is enhanced in some mental disorders, whereas suppression during meditation and resting is reported in meditation experts compared to novice. In this project, we aim at replicating the findings of an fMRI study of meditation in which DMN is activated and deactivated during different phases of mindfulness meditation [R1]. If we can detect forgoing transitions in DMN activity using FlexEEG, it would become possible to design a device that feedbacks DMN activation to the meditator. Such flexible and user-centric EEG devices will facilitate the general public's well-being and advance research by enabling large-scale studies to provide evidence across populations. Such evidence will provide a rational basis for designing meditation-based interventions to improve cognitive control and emotional inhibition through meditation.
[R1] Hasenkamp, W., Wilson-Mendenhall, C. D., Duncan, E., & Barsalou, L. W. (2012). Mind wandering and attention during focused meditation: a fine-grained temporal analysis of fluctuating cognitive states. Neuroimage, 59(1), 750-760.
This project will require two students, it will be in collaboration with the Indian Institute of Technology Roorkee and Juntendo University, Japan.
Main Supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-Supervisors: prof. Amita Giri (IIT Roorkee), Dr Sun Zhe, zhe.sun.vk@riken.jp
6. FlexEEG decoding of hand movement intention:
Multiple movements like opening or closing the hand, grasping, or showing the palm can be decoded from the EEG signals recorded while attempting to do those movements. The decodified movements can serve for multiple purposes. For example, in neurorehabilitation they can be used to provide feedback to a patient that is performing therapy to recover hand movements after stroke, and in brain-computer-interfaces to generate outputs that control an external device.
The objective of this project consists of decoding movement intentions by combining low-density EEG and source reconstruction (estimation of the activity inside the brain from the electrodes at scalp). The project involves recording EEG signals for multiple participants, analyze and build offline/online classifiers using state-of-the-art machine/deep learning algorithms.
This project will provide a foundation to develop wearable solution based on few electrodes that can be later use in neurorehabilitation therapies.
Main Supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-supervisor: Amita Giri, (IIT Roorkee)
7. FlexEEG headset prototype development: Within this project, 2 different topics will be offered:
7.1 Design and control of a robotic system for EEG measurements
The purpose of this project is to design a robotic system for the EEG electrodes. The prototype will be realized with a 3D printer.
7.2 EEG signal quality analysis of the new prototype
In this project the objective is to analyze the EEG signal and compare the quality of the measurements with standard EEG equipment.
Supervisor: Marta Molinas, marta.molinas@ntnu.no
8. Design of an EEG based communication system for patients with Locked-in Syndrome.
Locked-in syndrome (LIS) is a state of complete paralysis except for ocular movements in a conscious individual, normally resulting from brainstem lesions. These are patients who are conscious and aware of their environment but are physically disabled. There are some available solutions nowadays to help them communicate but the downside is the requirement for physical training which can be both time and money consuming. The main objective of this project is to help these patients communicate and engage more effectively in their daily life by using electroencephalogram (EEG)-based communication system to facilitate communication of these patients with their caretakers.
The project design will include hardware and software. The software will be a client-server architecture with the necessary preprocessing and classification algorithms for EEG signal processing. The server will include endpoints to manage eye movements classification, primary colours exposure, and mental imagery tasks (motor imagery). The classification models and the EEG data will be stored in a database.
The hardware-/client-side will use the OpenBCI EEG headset and a Raspberry Pi to show the possible options, collect the EEG data, and send it to the server. The OpenBCI will continuously read the patients’ scalps brainwaves while the Raspberry pi in front of them displays six basic needs, namely, food, water, washroom, help, sleep and entrainment.
The system (client-server) will act as a two-way communication link between patients and their caregiver, who will receive a notification via SMS or a basic Android application installed on the caregivers' phones.
Once the system is implemented and tested, the second phase of the project will consist on reducing the necessary EEG channels and thus reduce the headset and increase the portability.
The project will start using code already developed by previous students (available on GitHub). It is suitable for two students who can work in collaboration.
This project will require two students, there is an ongoing student that developed a software platform that will serve as starting point.
Supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-supervisor: Prof. Naveed Rehman, naveed.rehman@ece.au.dk
9. Flying a Drone with your Mind: FlexEEG motor imagery
This project is about an experimentation on actuation of unmanned vehicles directly with signals from the brain. This will be done through the use of an open source Electroencephalography (EEG) headset that records brain activity and translates it into commands for actuation of devices in real-time.

The task will consist on developing a Brain Computer Interface (BCI); that can directly give flying/landing commands from the brain to the drone. The Open BCI EEG headset will be used (http://www.openbci.com/) for recording the brain signals to be processed into commands that will be sent wirelessly to actuate the drone. Motor imagery will be used as command to fly the drone. Using this command, this project will fly a drone and develop a trajectory control directly from the motor imagery commands without using any manual actuation system in between.
The students in this project will have access to the open-source softwares, EEG headset and BCI already developed within this task by previous year students.
This project is suitable for two students to work in a team.
A basic software developed by a previous student will serve as starting point for this project.
Supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-supervisor: Dr Luis Alfredo Moctezuma, luis.a.moctezuma@gmail.com
10. FlexEEG based BCI system for ADHD Neurofeedback
Applying machine learning, brain mapping and EEG recording techniques with an open source Brain-Computer-Interface (BCI) system, the master student will work in the development of a system for classifying the brain activity in imaginary motor tasks, with the objective of navigating in a 3D virtual maze using the brain of the user for treatment of Attention-Deficit Hyperactivity Disorder (ADHD).
This project is in collaboration with Juntendo University, Japan. The NTNU student in this project has the option to write the Project or the Master Theis in Japan.
Supervisor: Marta Molinas, marta.molinas@ntnu.no
11. FlexEEG based Lie Detector
The aim of this project is to identify when a user is providing deceptive information using EEG signals. The master student will work in the development of a lie detection system, based on the analysis of EEG measuments, where he/she would combine knowledge of Event-Related Potentials, Signal Processing, and Machine Learning using an open source Brain-Computer-Interface (BCI) system.

Supervisor: Marta Molinas,marta.molinas@ntnu.no
12. FlexEEG based Biometric System for Subject Identification
The aim of this project is to implement a real-life Subject Identification System in real-time using brain signals collected from 100 recruited volunteers in Norway. The first prototype is already developed and will be the starting point for this larger implementation. The system consist of a client-server architecture using python and Django. The server side consist on feature extraction and machine learning techniques to add new persons to the system and save it in a database. The final implementation will be tested in a real environment, and it will be able to detect persons already in the system and reject the intruders.
A basic software developed by a previous student will serve as starting point for this project.
Supervisor: Marta Molinas, mailto:marta.molinas@ntnu.no
Co-supervisor: Dr Luis Alfredo Moctezuma, luis.a.moctezuma@gmail.com
13. The Augmented Human: Developing a BCI for RGB-Based Automation
This project explores the potential of brain-computer interfaces (BCIs) to control devices using EEG responses to primary color exposure (RGB: red, green and blue colors), moving beyond traditional paradigms that rely on external flickering stimuli like SSVEP and P300.
Students will work on two key phases:
🔹 Offline Analysis – Utilize existing EEG data collected by previous students, applying artifact removal, signal processing, and machine learning techniques to refine RGB color classification.
🔹 Online Implementation – Develop a real-time framework to control automated devices (e.g., an automated door or smart home appliances) based on EEG responses.
This hands-on project involves signal processing, machine learning, and real-time system development. Ideal for two students working collaboratively, it offers the chance to push the boundaries of non-invasive neural control systems.
The project is in collaboration with the Department of Electrical and Computer Engineering of Aarhus University, Denmark, with prof. Naveed Rehman.
A basic software developed by a previous student will serve as starting point for this project.
Main Supervisor: Marta Molinas, mailto:marta.molinas@ntnu.no
Co-supervisor: Prof. Naveed Rehman, naveed.rehman@ece.au.dk
14. FlexEEG: EEG-based Alcohol Detector
The measurement of alcohol in the human body is a public health's relevant task for avoiding accidents and deaths. Currently, we can do that through devices that analyse the alcohol content in breath (Breathanalysers). However, it is not clear if a machine learning algorithm could help to get a better estimation of the effect of booze by directly using EEG signals. Previous works have only approached the automatic distinction (under a machine learning approach) between EEG signals from alcoholic vs non-alcoholic subjects with relatively good outcomes.This project aims to assess the feasibility of using EEG signals for detecting when a person has drunk alcohol, i.e, an initial design towards an EEG-based alcohol detector (Alcotest device). The research in this project will imply the design of an EEG recording protocol from several subjects during and after the administration of alcohol and the main focus will be on assessing if a machine learning algorithm is able to effectively distinguish between the two states. Furthermore, it will involve the design of a scheme with the following stages: signal preprocessing, artifact removal, feature extraction, and classification.

This project is in collaboration with Juntendo University, Japan.
Supervisors: Marta Molinas, marta.molinas@ntnu.no, Prof. Zhe Sun, Juntendo Univeristy, Japan.
15. Prediction of Epileptic seizures with AI integrated FlexEEG.
Seizure warning devices using predictive algorithms could greatly improve quality of life by detecting the preictal phase—the transitional period before a seizure. Traditionally, seizure prediction relies on detecting this phase and triggering an alarm. However, recent research advocates for seizure forecasting, which provides continuous risk assessment rather than a binary alarm system. This project will compare prediction and forecasting methods using publicly available datasets (e.g., EPILEPSIAE database).
The starting point will be this study: Forcasting approach to epilepsy prediction
Main supervisor: Marta Molinas
Co-supervisor: Dr Luis Alfredo Moctezuma, luis.a.moctezuma@gmail.com
16. FlexEEG for BabyBCI
This project will develop the foundation for using EEG neuroimaging for real-time BCI classification on infant EEG data. Source-space features have been previously used in our work with Motor Imagery (Soler et al., 2024) and have shown incredible potential for classification improvement as compared to the more widely-used sensor-space features. To be able to extract good source-space features, especially with 128-electrode HD-EEG used in the data we have, it is essential to work with optimization techniques, and we suggest the following task:
- Model-Based Electrode Position Optimization for BCI Design: To develop the BabyBCI, the number of EEG electrodes needs to be minimized to ensure ease of use and enable real-time computation. The process will begin with high-density EEG recordings and an average infant brain model (Almli et al., 2007; Sanchez et al., 2012) successfully used in research for source space analyses which has identified brain regions activated during visual motion perception in both full-term and premature infants (Nenseth, S.-A. et al., under review). .Based on the HD-EEG recordings and the domain knowledge that gives us the brain regions of interest, we will employ optimization techniques (based on our previous work with NSGA optimization) (Soler et al., 2022) to determine the key EEG electrodes required for identifying brain activity related to the visual motion perception paradigms in babies. Although NSGA-optimization has proven fruitful in source localization, we will use multiple optimization techniques as part of the research.
This project will be in collaboration with the Developmental Neuroscience Laboratory of NTNU.
Main supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-Supervisor: Audrey Van Der Meer. audrey.meer@ntnu.no
17. Combining EEG and motion capture in immersive VR environment
Electroencephalography (EEG) is an electrophysiological monitoring method to measure electrical activity in the brain. From noninvasive small electrodes that are placed along the scalp, EEG record spontaneous electrical activity in our brain. Analyzing EEG signal data helps researchers to understand the cognitive process such as human emotions, perceptions, attentions and various behavioral processes.
Optical motion capture systems allow precise recordings of participants’ motor behavior inside small or larger laboratories including information on absolute position. Movement tracking is useful in, for example, rehabilitation settings where tracking a person’s movements during training can give valuable information to provide feedback on whether an exercise is performed correctly or not. Traditional systems often use specialized sensors (Kinect, accelerometers, marker-based motion tracking) and are therefore limited in their area of application and usability. With advances in Machine Learning for Human Pose Estimation (HPE), movement tracking has become a viable alternative for motion tracking.
Combining HPE-based movement tracking and EEG can provide the patient with more holistic feedback and help with progress in rehabilitation.
In this study, the students will combine EEG and HPE-based movement tracking, for an existing VR exergame. The EEG can be used to give the patient additional feedback on, for example, her/his attention level, movement intention, or cognitive load.
For comprehensive analysis of bio-signals tracked by various sensors, movement and brain data need to be time-synchronized with VR contents. The pipelines that could be used are https://www.neuropype.io/ or https://timeflux.io/ based on LabStreamingLayer. They should work with our EEG, Unity out of the box, however, are not yet synchronized with HPE.
The study is associated with Vizlab and the needed sensors and the basic training on how to use them (VR headset, EEG equipment) are provided.
This project is in collaboration with the Department of Computer Science, there will be two students working together, one from the Department of Computer Science and one from Cybernetics department.
Main-supervisor: Marta Molinas, marta.molinas@ntnu.no
Co-Supervisor: Xiaomeng Su, xiaomeng.su@ntnu.no, Department of Computer Science
Publikasjoner
2026
-
Shah, Chirag R.;
Norambuena, Margarita;
Molinas, Marta;
Rodriguez, Jose;
Føyen, Sjur;
Nilsen, Roy.
(2026)
Impedance-based Stability Characterization of Extended Finite Control Set MPC under Realistic Switching Constraints.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Yang, Ling;
Zhu, Difan;
He, Qijun;
Li, Jiewen;
Lian, Chenxi;
Wang, Yu;
Chen, Bing;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2026)
Frequency-Coupling Suppression Strategy for Grid-Connected Inverter Based on DC Voltage Loop Q-Axis Compensation.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Xiao, Yi;
Luo, Hao;
Yang, Yongheng;
Ruan, Hao;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede;
Loo, Ka Hong.
(2026)
Low-Frequency Oscillation Mechanism and Mitigation in Grid-Forming Inverters With Voltage Controller Effects.
IEEE transactions on industry applications
Vitenskapelig artikkel
2025
-
Zong, Haoxiang;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2025)
An Augmented Impedance Network Modeling Method with Explicit Synchronization Port for Stability Assessment of Multi-Converter System.
Journal of Modern Power Systems and Clean Energy
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2025)
From high- to low-density EEG for automatic classification of dream experiences during stage 2 of NREM.
SLEEP Advances
Vitenskapelig artikkel
-
Bing, Tian;
Wang, Quan;
Zhang, Guoqiang;
Molinas Cabrera, Maria Marta;
Wei, Jiadan;
Zhang, Zhuoran.
(2025)
A Sensorless Control for Five-Phase PMSMs Based on a Hybrid-Speed Estimator, Operating under Both Healthy and Single-Phase Open-Fault Conditions.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Torgersen, Eline Lyngaas;
Ragnarson, Ingrid;
Molinas Cabrera, Maria Marta.
(2025)
Decoding Attention through EEG: Paving the Way for BCI Applications in Attention-Related Disorders.
IEEE Engineering in Medicine and Biology Society. Conference Proceedings
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Bana, Prabhat Ranjan;
Føyen, Sjur;
Nilsen, Roy.
(2025)
Unveiling Stability Insights of Model Predictive Current Control in Voltage Source Converter through Impedance Analysis.
International Conference on Clean Electrical Power
Konferanseabstract
-
Ruan, Hao;
Xiao, Yi;
Luo, Hao;
Yang, Yongheng;
Molinas Cabrera, Maria Marta;
Luo, Haoze.
(2025)
Optimized Parameter Design of Grid-Following and Grid-Forming Converters for Wide Operating Region.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
D'Arco, Salvatore;
Nilsen, Roy;
Amin, Mohammad.
(2025)
Single Coordinate Bode Plots for Stability Evaluation of MIMO Power Electronics Systems via a Frequency Coupling Corrective Factor.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Gao, Lei;
Lyu, Jing;
Zong, Xin;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2025)
Online Oscillatory Stability Assessment of Renewable Energy Integrated Systems Based on Data-Driven and Knowledge-Driven Method.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2025)
Unlocking Dreams and Dreamless Sleep: Machine Learning Classification With Optimal EEG Channels.
BioMed Research International
Vitenskapelig artikkel
-
Yang, Ling;
Luo, Jiahao;
Liao, Junhao;
Wen, Xutao;
Yuan, Chongyao;
Wang, Yu;
Luo, Dongtao;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2025)
A fast SOC balancing control strategy for distributed energy storage system based on sinusoidal signal injection.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
2024
-
Teshome, Abeba Debru;
Kahsay, Mulu Bayray;
Molinas Cabrera, Maria Marta.
(2024)
Assessment of power curve performance of wind turbines in Adama-II Wind Farm.
Energy Reports
Vitenskapelig artikkel
-
Soler, Andres;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2024)
EEG source imaging of hand movement-related areas: an evaluation of the reconstruction and classification accuracy with optimized channels.
Brain Informatics
Vitenskapelig artikkel
-
Sletta, Øystein Stavnes;
Cheema, Amandeep;
Marthinsen, Anne Joo Yun;
Andreassen, Ida Marie;
Sletten, Christian Moe;
Galtung, Ivar Tesdal;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2024)
Newly identified Phonocardiography frequency bands for psychological stress detection with Deep Wavelet Scattering Network.
Computers in Biology and Medicine
Vitenskapelig artikkel
-
Aljalal, Majid;
Molinas Cabrera, Maria Marta;
Aldosari, Saeed A.;
AlSharabi, Khalil;
Abdurraqeeb, Akram M.;
Alturki, Fahd A..
(2024)
Mild cognitive impairment detection with optimally selected EEG channels based on variational mode decomposition and supervised machine learning.
Biomedical Signal Processing and Control
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Føyen, Sjur;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2024)
Influence of controller and reference frame on impedance coupling strength, its quantification and application to stability studies.
Vitenskapelig kapittel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2024)
Impedance Reshaping of GFM Converters with Selective Resistive Behaviour for Small-signal Stability Enhancement.
Vitenskapelig kapittel
-
Urdahl, Paal Scheline;
Omsland, Vegard;
Løkken, Sandra Garder;
Dokken, Mari Hestetun;
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta.
(2024)
Impact of Ocular Artifact Removal on EEG-Based Color Classification for Locked-In Syndrome BCI Communication.
Communications in Computer and Information Science (CCIS)
Vitenskapelig artikkel
-
Vassbotn, Molly;
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta;
Nordstrøm-Hauge, Iselin Johanna.
(2024)
EEG-Based Alcohol Detection System for Driver Monitoring.
International Journal of Psychological Research
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Suzuki, Yoko;
Furuki, Junya;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2024)
GRU-powered sleep stage classification with permutation-based EEG channel selection.
Scientific Reports
Vitenskapelig artikkel
-
Tian, Bing;
Li, Yingzhen;
Hu, Jiasongyu;
Wang, Gaolin;
Molinas Cabrera, Maria Marta;
Zhang, Guoqiang;
Wang, Kai;
Zhang, Zhuoran.
(2024)
A wide speed range sensorless control for three-phase PMSMs based on a high-dynamic back-EMF observer.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Hernández-Ramírez, Julio;
Segundo-Ramírez, Juan;
Molinas Cabrera, Maria Marta.
(2024)
Comprehensive DQ impedance modeling of AC power-electronics-based power systems with frequency-dependent transmission lines.
Electric power systems research
Vitenskapelig artikkel
-
Ma, Ke;
Liu, Jinjun;
Molinas Cabrera, Maria Marta.
(2024)
Guest Editorial: Special Issue on Design and Validation Methodologies for Power Electronics Components and Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig oversiktsartikkel
-
Chang, Liuchen;
Mazumder, Sudip K.;
Molinas Cabrera, Maria Marta.
(2024)
Guest Editorial: Special Issue on Power Electronics for Distributed Energy Resources.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig oversiktsartikkel
-
Zhang, Yu;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2024)
Control of Virtual Synchronous Generator with Improved Transient Angle Stability under Symmetric and Asymmetric Short Circuit Fault.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav Bjarte;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2024)
Power system instability prediction from the solution pattern of differential Riccati equations.
The Journal of Engineering
Vitenskapelig artikkel
-
Føyen, Sjur;
Shah, Chirag Ramgopal;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2024)
Synchronisation, dispatch and droop of VSCs: revisiting functionality in various coordinate systems.
IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG)
Vitenskapelig artikkel
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
Alturki, Fahd A..
(2024)
Correction to: Selecting EEG channels and features using multi-objective optimization for accurate MCI detection: validation using leave-one-subject-out strategy (Scientific Reports, (2024), 14, 1, (12483), 10.1038/s41598-024-63180-y).
Scientific Reports
Korrigendum
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
Alturki, Fahd A..
(2024)
Selecting EEG channels and features using multi-objective optimization for accurate MCI detection: validation using leave-one-subject-out strategy.
Scientific Reports
Vitenskapelig artikkel
2023
-
Føyen, Sjur;
Zhang, Chen;
Zhang, Yu;
Isobe, Takanori;
Fosso, Olav Bjarte;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2023)
Frequency Scanning of Weakly Damped Single-Phase VSCs With Chirp Error Control.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Bana, Prabhat Ranjan;
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2023)
ANN-Based Surrogate PI and MPC Controllers for Grid-Connected VSC System: Small-Signal Analysis and Comparative Evaluation.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Fløtaker, Simen Piene;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2023)
Primary color decoding using deep learning on source reconstructed EEG signal responses.
Vitenskapelig kapittel
-
Marthinsen, Anne Joo Yun;
Galtung, Ivar Tesdal;
Cheema, Amandeep;
Sletten, Christian Moe;
Andreassen, Ida Marie;
Sletta, Øystein Stavnes;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2023)
Psychological stress detection with optimally selected EEG channel using Machine Learning techniques.
CEUR Workshop Proceedings
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2023)
Limitations in Impedance Reshaping of Grid Forming Converters for Instability Prevention.
Vitenskapelig kapittel
-
Soler, Andres;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2023)
EEG source imaging of hand movement-related areas: An evaluation of the reconstruction accuracy with optimized channels.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
-
Park, Daeseong;
Zadeh, Mehdi;
Molinas Cabrera, Maria Marta.
(2023)
Model-Based Design of Marine Hybrid Power Systems - With a case study of DC Grid Architecture and Control.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
-
Yang, Ling;
Huang, Zehang;
Chen, Jinghua;
Luo, Jianqiang;
Wang, Yu;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2023)
Stability Analysis and Interaction-Rule-Based Optimization of Multisource and Multiload DC Microgrid.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav Bjarte;
Molinas Cabrera, Maria Marta.
(2023)
Recursive Multi-Channel Prony for PMU.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Zhang, Chen;
Zong, Haoxiang;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2023)
On the Relation of Nodal Admittance- and Loop Gain-Model Based Frequency-Domain Modal Methods for Converters-Dominated Systems.
IEEE Transactions on Power Systems
Vitenskapelig artikkel
-
Zhang, Yu;
Zhang, Chen;
Yang, Renxing;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2023)
Current-Constrained Power-Angle Characterization Method for Transient Stability Analysis of Grid-Forming Voltage Source Converters.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Tian, Bing;
Lu, Runze;
Wei, Jiadan;
Molinas Cabrera, Maria Marta;
Wang, Kai;
Zhang, Zhuoran.
(2023)
Neutral Voltage Modeling and Handling Approach for Five-Phase PMSMs Under Two-Phase Insulation Fault-Tolerant Control.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Ohuchi, Kazuki;
Hirase, Yuko;
Molinas Cabrera, Maria Marta.
(2023)
MIMO and SISO Impedance-based Stability Assessment of a Distributed Power Source Dominated System.
IEEJ Journal of Industry Applications
Vitenskapelig artikkel
-
Li, Jing;
Wei, Yingdong;
Li, Xiaoqian;
Lu, Chao;
Guo, Xu;
Lin, Yunzhi;
Molinas Cabrera, Maria Marta.
(2023)
Modeling and stability prediction for the static-power-converters interfaced flexible AC traction power supply system with power sharing scheme.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
2022
-
Khodaparast, Jalal;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2022)
Static and dynamic eigenvalues in unified stability studies.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Abe, Takashi;
Molinas Cabrera, Maria Marta.
(2022)
Two-dimensional CNN-based distinction of human emotions from EEG channels selected by Multi-Objective evolutionary algorithm.
Scientific Reports
Vitenskapelig artikkel
-
Tian, Bing;
Wei, Jiadan;
Molinas Cabrera, Maria Marta;
Lu, Runze;
An, Quntao;
Zhou, Bo.
(2022)
Neutral Voltage Modeling and Its Remediation for Five-Phase PMSMs under Single-Phase Short-Circuit Fault Tolerant Control.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
AlSharabi, Khalil;
Alturki, Fahd A..
(2022)
Detection of Parkinson’s disease from EEG signals using discrete wavelet transform, different entropy measures, and machine learning techniques.
Scientific Reports
Vitenskapelig artikkel
-
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Isobe, Takanori.
(2022)
Impedance scanning with chirps for single-phase converters.
Vitenskapelig kapittel
-
Zong, Haoxiang;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2022)
Analysis of Power Electronics-Dominated Hybrid
AC/DC Grid for Data-Driven Oscillation Diagnosis.
Vitenskapelig kapittel
-
Zhang, Yu;
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Cai, Xu.
(2022)
Instability Mode Recognition of Grid-Tied Voltage Source Converters with Nonstationary Signal Analysis.
Vitenskapelig kapittel
-
Ohuchi, Kazuki;
Hirase, Yuko;
Molinas Cabrera, Maria Marta.
(2022)
Impedance-Based Stability Analysis of Systems with
the Dominant Presence of Distributed Power Sources.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2022)
Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022 - ECCE Asia).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Zong, Haoxiang;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2022)
Oscillation Propagation Analysis of Hybrid AC/DC Grids with High Penetration Renewables.
IEEE Transactions on Power Systems
Vitenskapelig artikkel
-
Soler, Andres;
Moctezuma, Luis Alfredo;
Giraldo, Eduardo;
Molinas, Marta.
(2022)
Automated methodology for optimal selection of minimum electrode subsets for accurate EEG source estimation based on Genetic Algorithm optimization.
Scientific Reports
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2022)
Impedance Modeling and Comparative Analysis of
a Single-phase Grid-tied VSC Under Average and
Peak dc Voltage Controls.
Vitenskapelig kapittel
-
Khodaparast, Jalal;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2022)
Phasor Estimation by EMD-Assisted Prony.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Xiao, Donghua;
Hu, Haitao;
Chen, Siyi;
Song, Yitong;
Pan, Pengyu;
Molinas Cabrera, Maria Marta.
(2022)
Rapid dq-Frame Impedance Measurement for Three-Phase Grid Based on Interphase Current Injection and Fictitious Disturbance Excitation.
IEEE Transactions on Instrumentation and Measurement
Vitenskapelig artikkel
-
Leng, Minrui;
Sahoo, Subham;
Blaabjerg, Frede;
Molinas Cabrera, Maria Marta.
(2022)
Projections of Cyberattacks on Stability of DC Microgrids - Modeling Principles and Solution.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Wang, Yu;
Guan, Yuanpeng;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Hu, Wang;
Zhang, Yun.
(2022)
Open-Circuit Switching Fault Analysis and Tolerant Strategy for Dual-Active-Bridge DC-DC Converter Considering Parasitic Parameters.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Stenwig, Håkon;
Soler, Andres;
Furuki, Junya;
Suzuki, Yoko;
Abe, Takashi;
Molinas, Marta.
(2022)
Automatic Sleep Stage Classification with Optimized Selection of EEG Channels.
Vitenskapelig kapittel
-
Soler, Andres;
Giraldo, Eduardo;
Lundheim, Lars Magne;
Molinas Cabrera, Maria Marta.
(2022)
Relevance-based Channel Selection for EEG Source Reconstruction: An Approach to Identify Low-density Channel Subsets.
Vitenskapelig kapittel
2021
-
Zong, Haoxiang;
Zhang, Chen;
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2021)
Block Diagonal Dominance-Based Model Reduction Method Applied to MMC Asymmetric Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Debru, Abeba;
Kahsay, Mulu Bayray;
Molinas Cabrera, Maria Marta.
(2021)
ADAMA-II wind farm performance assessment in comparison to feasibility study.
Wind Engineering : The International Journal of Wind Power
Vitenskapelig artikkel
-
Singh, Rajiv;
Padmanaban, Sanjeevikumar;
Dwivedi, Sanjeet;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede.
(2021)
Cable Based and Wireless Charging Systems for Electric Vehicles:
Technology and control, management and grid integration.
Institution of Engineering and Technology (IET)
Lærebok
-
Ojo, Joseph Olorunfemi;
Tsorng-Juu, Peter Liang;
Doolla, Suryanarayana;
Harnefors, Lennart;
Yuen, Ron Hui Shu;
Kawakami, Noriko;
Jih-Sheng, Jason Lai;
Yen-Shin, Lai;
Liu, Yan-Fei;
Maksimovic, Dragan.
(2021)
A Mustard Seed Planted Years Ago Sprouts and Continues to Grow.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Leder
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
An, Quntao;
Bo, Zhou;
Wei, Jiadan.
(2021)
Freewheeling Current-Based Sensorless Field-Oriented Control of Five-Phase Permanent Magnet Synchronous Motors Under IGBT Failures of a Single Phase.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Chen, Zhang;
Isobe, Takanori;
Suul, Jon Are Wold;
Dragicevic, Tomislav;
Molinas Cabrera, Maria Marta.
(2021)
Parametric Stability Assessment of Single-Phase Grid-Tied VSCs Using Peak and Average DC Voltage Control.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Wang, Yu;
Guan, Yuanpeng;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Chen, Si-Zhe;
Zhang, Yun.
(2021)
An Input-Voltage-Sharing Control Strategy of Input-Series Output-Parallel Isolated Bidirectional DC/DC Converter for DC Distribution Network.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Singh, Rajiv;
Sanjeevikumar, Padmanaban;
Kumar, Dwivedi Sanjeet;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede.
(2021)
Cable Based and Wireless Charging Systems for Electric Vehicles: Technology and control, management and grid integration.
Institution of Engineering and Technology (IET)
Oppslagsverk
-
Liu, Jinhong;
Molinas Cabrera, Maria Marta.
(2021)
Impact of digital time delay on the stable grid-hosting capacity of large-scale centralised PV plant.
IET Renewable Power Generation
Vitenskapelig artikkel
-
Torres-García, Alejandro A.;
Mendoza-Montoya, Omar;
Molinas Cabrera, Maria Marta;
Antelisc, Javier M.;
Moctezuma, Luis Alfredo;
Hernández-Del-Toro, Tonatiuh.
(2021)
Pre-processing and Feature Extraction.
Faglig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2021)
EEG-based subject identification with multi-class classification.
Faglig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2021)
A Two-stage Area-efficient High Input Impedance CMOS Amplifier for Neural Signals.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Moeinfard, Tania;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2021)
A Low-power High-gain Inverter Stacking Amplifier with Rail-to-Rail Output.
Vitenskapelig kapittel
-
Garcia Rosa, Paula Bastos;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2021)
Switching sequences for non-predictive declutching control of wave energy converters.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Drange, Ole;
Furuki, Junya;
Abe, Takashi;
Molinas, Marta Maria Cabrera.
(2021)
Automatic Onset Detection of Rapid Eye Movements in REM Sleep EEG Data.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Ludvigsen, Sara Lund;
Buøen, Emma Horn;
Soler Guevara, Andres Felipe;
Molinas, Marta Maria Cabrera.
(2021)
Searching for Unique Neural Descriptors of Primary Colours in EEG Signals: A Classification Study.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
2020
-
Li, Chendan;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Yue, Jingpeng;
Raboni, Pietro.
(2020)
Defining Three Distribution System Scenarios for Microgrid Applications.
Vitenskapelig kapittel
-
Nøland, Jonas Kristiansen;
Molinas Cabrera, Maria Marta.
(2020)
Rotating Power Electronics for Electrical Machines and Drives - Design Considerations and Examples.
Vitenskapelig kapittel
-
Torres-Garcia, Alejandro Antonio;
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Assessing the impact of idle state type on the identification of RGB color exposure for BCI.
Vitenskapelig kapittel
-
Pettersen, Martine Furnes;
Fosso, Olav B;
Garcia Rosa, Paula Bastos;
Molinas Cabrera, Maria Marta.
(2020)
Effect of non-ideal power take-off on the electric output power of a wave energy converter under suboptimal control.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2020)
Stability Analysis of a Virtual Synchronous
Machine-based HVDC Link by Gear's Method.
Vitenskapelig kapittel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Heidari, Ali.
(2020)
A Fully Tunable Low-power Low-noise and High Swing EMG Amplifier with 8.26 PEF.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
A fully differential capacitively-coupled high CMRR low-power chopper amplifier for EEG dry electrodes.
Analog Integrated Circuits and Signal Processing
Vitenskapelig artikkel
-
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Isobe, Takanori.
(2020)
Single-phase synchronisation with Hilbert
transformers: a linear and frequency independent
orthogonal system generator.
Vitenskapelig kapittel
-
Villanueva, J.;
Lopez, Maximiliano Bueno;
Simón, J.;
Molinas Cabrera, Maria Marta;
Flores, J.;
Mendez, P.E..
(2020)
Application of Hilbert-Huang transform in the analysis of satellite-communication signals.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2020)
Harmonic-Domain SISO Equivalent Impedance Modeling and Stability Analysis of a Single-Phase Grid-Connected VSC.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Multi-objective optimization for EEG channel selection and accurate intruder detection in an EEG-based subject identification system.
Scientific Reports
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Gutiérrez, Pablo Andrés Muñoz;
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2020)
Low-Density EEG for Neural Activity Reconstruction Using Multivariate Empirical Mode Decomposition.
Frontiers in Neuroscience
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2020)
Low-Density EEG for Source Activity Reconstruction using Partial Brain Models.
Vitenskapelig kapittel
-
Sahoo, Subham;
Rana, Rubi;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede;
Dragicevic, Tomislav;
Mishra, Sukumar.
(2020)
A Linear Regression Based Resilient Optimal Operation of AC Microgrids.
Vitenskapelig kapittel
-
Shad, Erwin;
Molinas, Marta;
Ytterdal, Trond.
(2020)
A Low-power and Low-noise Multi-purpose Chopper Amplifier with High CMRR and PSRR.
Vitenskapelig kapittel
-
Zhang, Chen;
Føyen, Sjur;
Suul, Jon Are Wold;
Molinas, Marta Maria Cabrera.
(2020)
Modeling and Analysis of SOGI-PLL/FLL-based Synchronization Units: Stability Impacts of Different Frequency-feedback Paths.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas, Marta Maria Cabrera;
Heidari, Ali;
Ytterdal, Trond.
(2020)
A Very Low SEF Neural Amplifier by Utilizing a High Swing Current-Reuse Amplifier.
Vitenskapelig kapittel
-
Li, Jing;
Liu, Qiujiang;
Zhai, Yating;
Molinas Cabrera, Maria Marta;
Wu, Mingli.
(2020)
Analysis of Harmonic Resonance for Locomotive and Traction Network Interacted System Considering the Frequency-Domain Passivity Properties of the Digitally Controlled Converter.
Frontiers in Energy Research
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
Impedance and Noise of Passive and Active Dry EEG Electrodes: A Review.
IEEE Sensors Journal
Vitenskapelig oversiktsartikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Towards a minimal EEG channel array for a biometric system using resting-state and a genetic algorithm for channel selection.
Scientific Reports
Vitenskapelig artikkel
-
Liu, Jinhong;
Molinas Cabrera, Maria Marta.
(2020)
Impact of inverter digital time delay on the harmonic characteristics of grid-connected large-scale photovoltaic system.
IET Renewable Power Generation
Vitenskapelig artikkel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Heidari, Ali.
(2020)
A Power Efficient Low-noise and High Swing CMOS Amplifier for Neural Recording Applications.
IEEE Engineering in Medicine and Biology Society. Conference Proceedings
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Naderi, Kebria;
Molinas Cabrera, Maria Marta.
(2020)
High Input Impedance Capacitively-coupled Neural Amplifier and Its Boosting Principle.
Vitenskapelig kapittel
-
Zhang, Chen;
Cai, Xu;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2020)
Modeling and analysis of grid-synchronizing stability of a Type-IV wind turbine under grid faults.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2020)
An Integrated Method for Generating VSCs’ Periodical Steady-state Conditions and HSS-based Impedance Model.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Classification of low-density EEG for epileptic seizures by
energy and fractal features based on EMD.
Journal of Biomedical Research (JBR)
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Zheng, Li;
Cai, Xu.
(2020)
Synchronizing Stability Analysis and Region of Attraction Estimation of Grid-Feeding VSCs Using Sum-of-Squares Programming.
Frontiers in Energy Research
Vitenskapelig artikkel
-
Lopez, Maximiliano Bueno;
Sanabria-Villamizar, Mauricio;
Molinas Cabrera, Maria Marta;
Bernal-Alzate, Efrain.
(2020)
Oscillation analysis of low-voltage distribution systems with high penetration of photovoltaic generation.
Electrical engineering (Berlin. Print)
Vitenskapelig artikkel
-
Zong, Haoxiang;
Zhang, Chen;
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Fangquan, Rao.
(2020)
Generalized MIMO Sequence Impedance Modeling and Stability Analysis of MMC-HVDC With Wind Farm Considering Frequency Couplings.
IEEE Access
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
EEG Channel-Selection Method for Epileptic-Seizure Classification Based on Multi-Objective Optimization.
Frontiers in Neuroscience
Vitenskapelig artikkel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2020)
High dynamic speed control of the Subsea Smart Electrical Actuator for a Gas Production System.
Vitenskapelig kapittel
-
Tian, Bing;
Sun, Li;
Molinas Cabrera, Maria Marta;
An, Quntao.
(2020)
Repetitive control based phase voltage modulation amendment for FOC-based five-phase PMSMs under single-phase open fault.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig.
(2020)
2020 IEEE International Conference on Industrial Technology (ICIT).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Wu, Mingli;
Li, Jing;
Liu, Qiujiang;
Yang, Shaobing;
Molinas Cabrera, Maria Marta.
(2020)
Measurement of Impedance-Frequency Property of Traction Network Using Cascaded H-Bridge Converters: Device Design and On-Site Test.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Villanueva, J.;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta;
Flores, J;
Mendez, PE.
(2020)
Aplicación de la transformada de Hilbert-Huang en el análisis de señales de comunicación satelital.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Tarasiuk, Tomasz;
Zunino, Yuri;
Lopez, Maximiliano Bueno;
Silvestro, Federico;
Pilatis, Andrzej;
Molinas Cabrera, Maria Marta.
(2020)
Frequency Fluctuations in Marine Microgrids: Origins and Identification Tools.
IEEE Electrification Magazine
Vitenskapelig artikkel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
An, Quntao.
(2020)
PWM investigation of a Field-oriented controlled Five-Phase PMSM under two-phase open faults.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Nøland, Jonas Kristiansen;
Leandro, Matteo;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2020)
High-Power Machines and Starter-Generator Topologies for More Electric Aircraft: A Technology Outlook.
IEEE Access
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Moeinfard, Tania;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
A Power Efficient, High Gain and High Input Impedance Capacitively-coupled Neural Amplifier.
Vitenskapelig kapittel
2019
-
Haring, Mark;
Skjong, Espen;
Johansen, Tor Arne;
Molinas, Marta.
(2019)
Extremum-Seeking Control for Harmonic Mitigation in Electrical Grids of Marine Vessels.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
Discussion on the mode mixing in wave energy control systems using the Hilbert-Huang transform.
Proceedings of the European Wave and Tidal Energy Conference (EWTEC)
Vitenskapelig artikkel
-
Gasca, Maria Victoria;
Garces, Alejandro;
Molinas Cabrera, Maria Marta.
(2019)
Stability Analysis of the Proportional-Resonant Controller in Single Phase Converters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2019)
2019 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2019)
Non-filter position sensorless control based on a α-β frame complex PI controller.
Vitenskapelig kapittel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Zong, Haoxiang;
Cai, Xu.
(2019)
Understanding the Nonlinear Behaviour and Synchronizing Stability of a Grid-Tied VSC Under Grid Voltage Sags.
Vitenskapelig kapittel
-
Zong, Haoxiang;
Lyu, Jing;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Mimo impedance based stability analysis of DFIG-based wind farm with MMC-HVDC in modifed sequence domain.
Vitenskapelig kapittel
-
Tian, Bing;
An, Qun-Tao;
Molinas Cabrera, Maria Marta.
(2019)
High-Frequency Injection-Based Sensorless Control for a General Five-Phase BLDC Motor Incorporating System Delay and Phase Resistance.
IEEE Access
Vitenskapelig artikkel
-
Zong, Haoxiang;
Lyu, Jing;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Modified sequence domain impedance modelling of the modular multilevel converter.
Vitenskapelig kapittel
-
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
The Mode Mixing Problem and its Influence in the Neural Activity Reconstruction.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Alessandro, Boveri;
Silvestro, Federico;
Molinas Cabrera, Maria Marta;
Espen, Skjong.
(2019)
Optimal Sizing of Energy Storage Systems for Shipboard Applications.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Subject Identification from Low-Density EEG-Recordings of Resting-States: A Study of Feature Extraction and Classification.
Lecture Notes in Networks and Systems
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rygg, Atle;
Cai, Xu.
(2019)
Impedance-based Analysis of Interconnected
Power Electronics Systems: Impedance
Network Modeling and Comparative Studies of
Stability Criteria.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Nøland, Jonas Kristiansen;
Leandro, Matteo;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Nilssen, Robert.
(2019)
Electrical Machines and Power Electronics for Starter-Generators in More Electric Aircrafts: A Technology Review.
Vitenskapelig kapittel
-
Unamuno, Eneko;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Barrena, Jon Andoni.
(2019)
Comparative Eigenvalue Analysis of Synchronous
Machine Emulations and Synchronous Machines.
Vitenskapelig kapittel
-
Amin, Mohammad;
Zhang, Chen;
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Unamuno, Eneko;
Belkhayat, Mohamed.
(2019)
Nyquist Stability Criterion and its Application to Power Electronics Systems.
Kapittel i oppslagsverk
-
Sang, Shun;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Zhang, Jianwen;
Rao, Fangquan.
(2019)
Control of a Type-IV Wind Turbine with the Capability of Robust Grid-Synchronization and Inertial Response for Weak Grid Stable Operation.
IEEE Access
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2019)
Frequency-domain modelling and stability analysis of a DFIG-based wind energy conversion system under non-compensated AC grids: impedance modelling effects and consequences on stability.
IET Power Electronics
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rygg, Atle;
Lyu, Jing;
Cai, Xu.
(2019)
Harmonic Transfer-function-based Impedance Modelling of a Three-phase VSC for Asymmetric AC Grids Stability Analysis.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Sanabria-Villamizar, Mauricio;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta;
Bernal, Efrain.
(2019)
Hybrid Technique for the Analysis of Non-Linear and Non-Stationary Signals focused on Power Quality.
IEEE Xplore Digital Library
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Brodtkorb, Astrid H.;
Sørensen, Asgeir Johan;
Molinas Cabrera, Maria Marta.
(2019)
Evaluation of wave-frequency motions extraction from dynamic positioning measurements using the empirical mode decomposition.
Vitenskapelig kapittel
-
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta;
Giraldo, Eduardo.
(2019)
Partial Brain Model For real-time classification of RGB visual stimuli: A brain mapping approach to BCI.
Vitenskapelig kapittel
-
Munoz, Pablo;
Giraldo, Eduardo;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta.
(2019)
Automatic Selection of Frequency Bands for Electroencephalographic Source Localization.
International IEEE/EMBS Conference on Neural Engineering
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2019)
Modified Current-reuse OTA to Achieve High CMRR by utilizing Cross-coupled Load.
Vitenskapelig kapittel
-
Bergna-Diaz, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2019)
Optimal Shaping of the MMC Circulating Currents for Preventing AC-Side Power Oscillations from Propagating into HVdc Grids.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Torres-Garcia, Alejandro Antonio;
Molinas Cabrera, Maria Marta.
(2019)
Analyzing the Recognition of Color Exposure and Imagined Color from EEG Signals.
Vitenskapelig kapittel
-
Maldonado, Juvenal Villanueva;
Lopez, Maximiliano Bueno;
Rodriguez, Jorge Simon;
Molinas Cabrera, Maria Marta;
Troncoso, Jorge Flores;
Monroy, Paul Erick Mendez.
(2019)
Aplicación de la Transformada de Hilbert-Huang en el Análisis de Señales de Comunicación Satelital.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Monti, Antonello;
Molinas Cabrera, Maria Marta.
(2019)
A Ship Is a Microgrid and a Microgrid Is a Ship: Commonalities and Synergies.
IEEE Electrification Magazine
Leder
-
Corigliano, Silvia;
Mocecchi, Matteo;
Mirbagheri, Mina;
Merlo, Marco;
Molinas Cabrera, Maria Marta.
(2019)
Microgrid design: sensitivity on models and parameters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2019)
19th International Conference on Bioinformatics and Bioengineering.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Sex differences observed in a study of EEG of linguistic activity and resting-state: Exploring optimal EEG channel configurations.
Vitenskapelig kapittel
-
Lopez, Maximiliano Bueno;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
The mode mixing problem and its influence in the neural activity reconstruction.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Event-related potential from EEG for a two-step Identity Authentication System.
IEEE Conference on Industrial Informatics
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2019)
2019 15th Conference on Ph.D Research in Microelectronics and Electronics (PRIME).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Åsly, Sara Hegdahl;
Moctezuma, Luis Alfredo;
Gilde, Monika;
Molinas Cabrera, Maria Marta.
(2019)
Towards EEG-based signals classification of RGB color-based stimuli.
Faglig kapittel
-
Maximiliano, Bueno-López;
Andrés, Muñoz-Gutiérrez Pablo;
Eduardo, Giraldo;
Molinas Cabrera, Maria Marta.
(2019)
Electroencephalographic Source Localization based on Enhanced Empirical Mode Decomposition.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Xie, Xiarong;
Wang, Xiongfei;
Hu, Jiabing;
Xu, Lie;
Bongiorno, Massimo;
Miao, Zhixin;
Molinas Cabrera, Maria Marta;
Pota, Hemanshu;
Rodriguez, Pedro.
(2019)
Guest Editorial: Oscillations in Power Systems with High Penetration of Renewable Power Generations.
IET Renewable Power Generation
Leder
-
Skjong, Espen;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta.
(2019)
Distributed control architecture for real-time model predictive control for system-level harmonic mitigation in power systems.
ISA transactions
Vitenskapelig artikkel
-
Leandro, Matteo;
Bianchi, Nicola;
Molinas Cabrera, Maria Marta;
Ummaneni, Ravindra Babu.
(2019)
Low Inductance Effects on Electric Drives using Slotless Permanent Magnet Motors: A Framework for Performance Analysis.
Vitenskapelig kapittel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2019)
A Gray-Box Method for Stability and Controller Parameter Estimation in HVDC-Connected Wind Farms Based on Nonparametric Impedance.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2019)
DYNLO: Enhancing Non-linear Regularized State Observer Brain Mapping Technique by Parameter Estimation with Extended Kalman Filter.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2019)
Non-filter position sensorless control based on a α-β frame complex PI controller.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Zong, Haoxiang;
Lyu, Jing;
Cai, Xu;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Accurate aggregated modelling of wind farm systems in modified sequence domain for stability analysis.
Electric power systems research
Vitenskapelig artikkel
-
Lopez, Maximiliano Bueno;
Rodriguez-Sanchez, Patricia;
Molinas Cabrera, Maria Marta.
(2019)
Sustainable model for rural electrification projects in Non-Interconnected Areas in Colombia.
IEEE Xplore Digital Library
Vitenskapelig artikkel
-
Li, Jing;
Wu, Mingli;
Molinas Cabrera, Maria Marta;
Song, Kejian;
Liu, Qiujiang.
(2019)
Assessing High-Order Harmonic Resonance in Locomotive-Network Based on the Impedance Method.
IEEE Access
Vitenskapelig artikkel
-
Li, Chendan;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Qin, Nan;
Zhu, Lin.
(2019)
A Data-driven Approach to Grid Impedance : Identification for Impedance-based Stability Analysis under Different Frequency Ranges.
Vitenskapelig kapittel
-
See, Phen Chiak;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Wong, Kuan Yew.
(2019)
An Approach for Establishing a Common Grid Model for Flow-based Market Mechanism Simulations.
CSEE Journal of Power and Energy Systems (JPES)
Vitenskapelig artikkel
-
Føyen, Sjur;
Fosso, Olav B;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2019)
Frequency Domain Modelling for Assessment of Hilbert and SOGI Based Single-Phase Synchronisation.
Vitenskapelig kapittel
-
Melby, Mathias;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2019)
Impact of Virtual Oscillator Control on the instantaneous properties of VSC output voltage in distorted island grids.
Vitenskapelig kapittel
2018
-
Garcia Rosa, Paula Bastos;
Ringwood, John V.;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
The impact of time-frequency estimation methods on the performance of wave energy converters under passive and reactive control.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2018)
A meta-parameterized approach for the evaluation of semiconductor technologies - A comparison between SiC-MOSFET and Si-IGBT technologies-.
IEEJ Journal of Industry Applications
Vitenskapelig artikkel
-
Bueno-Lopez, Maximiliano;
Muñoz-Gutiérrez, Pablo A.;
Eduardo, Giraldo;
Molinas Cabrera, Maria Marta.
(2018)
Analysis of Epileptic Activity Based on Brain Mapping of EEG Adaptive Time-Frequency Decomposition.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Efficient Phasor Estimation under Steady State and
Dynamic Conditions.
Vitenskapelig kapittel
-
Segura, María Victoria Gasca;
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2018)
Time-Frequency analysis for nonlinear and non-stationary signals using HHT: A mode mixing separation technique.
IEEE Latin America Transactions
Vitenskapelig artikkel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Phasor Estimation based on Modified Recursive Prony.
Vitenskapelig kapittel
-
Unamuno, Eneko;
Rygg, Atle;
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Barrena, Jon Andoni.
(2018)
Impedance-Based Stability Evaluation of Virtual Synchronous Machine Implementations in Converter Controllers.
Vitenskapelig kapittel
-
Roaldsnes, Kristian Eggereide;
Gjengedal, Ørjan;
Molinas Cabrera, Maria Marta.
(2018)
Exploring the Attributes of Particle Filter vs Nonlinear Kalman Filter for Battery State of Charge Estimation.
Vitenskapelig kapittel
-
Gallegos, Noe Barrera;
Gasca Segura, Maria Victoria;
Molinas Cabrera, Maria Marta.
(2018)
Synchronization properties of Voltage Source Converters when seen as Coupled Oscillators based on the Kuramoto Model.
Vitenskapelig kapittel
-
Lyu, Jing;
Zhang, Xin;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2018)
Harmonic State-Space Based Small-Signal Impedance Modeling of Modular Multilevel Converter with Consideration of Internal Harmonic Dynamics.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Aabrek, Vegar;
Forseth, Ingvild;
Maximiliano, Bueno-Lopez;
Molinas Cabrera, Maria Marta.
(2018)
Design and Implementation of a Monitoring System for Decision Support in a Micro-Business Based on Solar Energy Microgrid in Rural Colombia.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2018)
Brain Informatics. BI 2018. Lecture Notes in Computer Science.
Springer Publishing Company
Antologi
-
Liu, Jinhong;
Zhou, Lin;
Molinas Cabrera, Maria Marta.
(2018)
Damping region extension for digitally controlled LCL-type grid-connected inverter with capacitor-current feedback.
IET Power Electronics
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta.
(2018)
IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Jing, Lyu;
Cai, Xu;
Xing, Zhang;
Molinas Cabrera, Maria Marta.
(2018)
Harmonic State Space Modeling and Analysis of Modular Multilevel Converter.
Vitenskapelig kapittel
-
Andrés, Muñoz-Gutiérrez Pablo;
Eduardo, Giraldo;
Maximiliano, Bueno-Lopez;
Molinas Cabrera, Maria Marta.
(2018)
Localization of Active Brain Sources From EEG Signals Using Empirical Mode Decomposition: A Comparative Study.
Frontiers in Integrative Neuroscience
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta.
(2018)
2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Lyu, Jing;
Xu, Cai;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Renxing, Yang;
Fangquan, Rao.
(2018)
Analysis of Bifurcation Behaviors in MMC Connected to a Weak Grid.
Vitenskapelig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2018)
Towards an API for EEG-Based Imagined Speech classification.
Vitenskapelig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2018)
EEG-based Subjects Identification based on Biometrics of Imagined Speech using EMD.
Vitenskapelig kapittel
-
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
EMD Mode Mixing Separation of Signals with
Close Spectral Proximity in Smart Grids.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2018)
2018 IEEE Global Humanitarian Technology Conference (GHTC).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
EMD-Prony for Phasor Estimation in Harmonic and Noisy Condition.
Vitenskapelig kapittel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2018)
On the Impedance Modeling and Equivalence of AC/DC Side Stability Analysis of a Grid-tied Type-IV Wind Turbine System.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Real Time Phasor Estimation based on Recursive Prony with Several Channels of One PMU.
Vitenskapelig kapittel
2017
-
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2017)
Optimal Design of Controller Parameters for Improving the Stability of MMC-HVDC for Wind Farm Integration.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Hillenbrand, Benedikt;
Molinas Cabrera, Maria Marta.
(2017)
Impact of time varying angular frequency on the separation of instantaneous power components in stand-alone power systems.
Proceedings of the 2017 6th International Conference on Clean Electrical Power (ICCEP 2017), Institute of Electrical and Electronics Engineers ( IEEE )
Antologi
-
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Lundheim, Lars Magne;
Fosso, Olav B.
(2017)
Simple model for understanding harmonics propagation in single-phase microgrids.
Vitenskapelig kapittel
-
Bernal, Efrain;
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta.
(2017)
Decentralized Fuzzy-Based Voltage Control for LV Distribution Systems.
Vitenskapelig kapittel
-
Garcia Rosa, Paula Bastos;
Kulia, Geir;
Ringwood, John V.;
Molinas Cabrera, Maria Marta.
(2017)
Real-Time Passive Control of Wave Energy Converters Using the Hilbert-Huang Transform.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta;
Sun, Jian.
(2017)
Guest editorial: Special issue on power electronics and systems: Modeling, analysis, control, and stability.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Leder
-
Lyu, Jing;
Cai, Xu;
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Sub-synchronous Oscillation Mechanism and Its Suppression in MMC-Based HVDC Connected Wind Farms.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Apparent impedance analysis: A small-signal method for stability analysis of power electronic based systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Chen, Zhang;
Cai, Xu;
Li, Zheng;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Properties and physical interpretation of the dynamic interactions between voltage source converters and grid: electrical oscillation and its stability control.
IET Power Electronics
Vitenskapelig artikkel
-
Chen, Zhang;
Cai, Xu;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Sequence Domain SISO Equivalent Models of a Grid-Tied Voltage Source Converter System for Small-Signal Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Chen, Zhang;
Cai, Xu.
(2017)
On the equivalence and impact on stability of impedance modeling of power electronic converters in different domains.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Thams, Florian;
Erickson, Robert P.;
Molinas Cabrera, Maria Marta.
(2017)
Interaction of Droop Control Structures and its inherent effect on the power transfer limits in multi-terminal VSC-HVDC.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Knai, Kathrine;
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Skjaervold, Nils Kristian.
(2017)
Instantaneous frequencies of continuous blood pressure
A comparison of the power spectrum, the continuous wavelet transform and the Hilbert-Huang transform.
Advances in Adaptive Data Analysis
Vitenskapelig artikkel
-
Amin, Mohammad;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Self-synchronisation of Wind Farm in MMC-based HVDC System: A Stability Investigation.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Small-Signal Stability Assessment of Power Electronics based Power Systems: A Discussion of Impedance- and Eigenvalue-based Methods.
IEEE transactions on industry applications
Vitenskapelig artikkel
-
Zhang, Chen;
Li, Zheng;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2017)
Properties and Physical Interpretation of the Dynamic Interactions between Voltage Source Converters and Grid: Electrical Oscillation and Its Stability Control.
IET Power Electronics
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Cai, Xu.
(2017)
On the Equivalence and Impact on Stability of Impedance Modeling of Power Electronic Converters in Different Domains.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2017)
Sequence Domain SISO Equivalent Models of a Grid-tied Voltage Source Converter System for Small-Signal Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Gjengedal, Ørjan;
Vie, Preben Joakim Svela;
Molinas, Marta.
(2017)
Battery modeling and Kalman filter-based State-of-Charge estimation for a race car application.
Vitenskapelig kapittel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Small-signal Stability Characterization of Interaction Phenomena between HVDC Systems and Wind Farms.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
-
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2017)
Analysis of Neural Activity from EEG Data based on EMD frequency bands.
Vitenskapelig kapittel
-
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Kulia, Geir.
(2017)
Understanding Instantaneous frequency detection: A discussion of Hilbert-Huang Transform versus Wavelet Transform.
University of Granada
Antologi
-
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Kulia, Geir.
(2017)
Proceedings of the International Work-Conference on Time Series Analysis.
Vitenskapelig kapittel
-
Guerrero, Josep;
Davoudi, Ali;
Belkhayat, Mohamed;
Benbouzid, Mohamed El Hachemi;
Corzine, Keith A.;
Cramer, Aaron M.;
Dougal, Roger A.;
Gamini, Shanta;
Khersonsky, Yuri;
Kouro, Samir.
(2017)
Guest editorial Energy conversion in next-generation electric ships.
IEEE transactions on energy conversion
Leder
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Understanding the origin of oscillatory phenomena observed between wind farms and HVDC systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Cai, Xu.
(2017)
Impact of power flow direction on the stability of VSC-HVDC seen from the impedance nyquist plot.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Gavagsaz-Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2017)
Discrete-Time Tool for Stability Analysis of DC Power Electronics-Based Cascaded Systems.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Lyu, Jing;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2017)
Stabilization control methods for enhancing the stability of wind farm integration via an MMC-based HVDC system.
Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2017), Institute of Electrical and Electronics Engineers
Antologi
-
Skjong, Espen;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta;
Sørensen, Asgeir Johan.
(2017)
Approaches to Economic Energy Management in Diesel-Electric Marine Vessels.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Cai, Xu.
(2017)
A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
2016
-
Molinas Cabrera, Maria Marta;
Barrera-Cardenas, Rene Alexander.
(2016)
Modelling of power electronics components for evaluation of efficiency, power density and power-to-mass ratio of offshore wind power converters.
Faglig kapittel
-
Molinas Cabrera, Maria Marta.
(2016)
Research Group Introduction: Marta Molinas’ “Cybernetics of Power Electronics Systems” Laboratory, Department of Engineering Cybernetics, Norwegian University of Science and Technology.
IEEJ Transactions on Industry Applications
Populærvitenskapelig artikkel
-
Skjong, Espen;
Gale, Serge;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2016)
Data-Driven decision support tool for power quality measures in marine vessel power system.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
D'Arco, Salvatore;
Rodríguez, Pedro;
Molinas Cabrera, Maria Marta.
(2016)
Impedance-compensated grid synchronisation for extending the stability range of weak grids with voltage source converters.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Mandelli, Stefano;
Brivio, Claudio;
Leonardi, Matteo;
Colombo, Emanuela;
Molinas Cabrera, Maria Marta;
Park, Eugene;
Merlo, Marco.
(2016)
The role of electrical energy storage in sub-Saharan Africa.
Journal of Energy Storage
Vitenskapelig oversiktsartikkel
-
Broen, Anders Kjeka;
Amin, Mohammad;
Skjong, Espen;
Molinas Cabrera, Maria Marta.
(2016)
Instantaneous frequency tracking of harmonic distortions for grid impedance identification based on Kalman filtering.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2016)
Discrete-time tool for stability analysis of DC power electronics-based cascaded systems.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2016)
Self-synchronisation of wind farm in MMC-based HVDC system.
Vitenskapelig kapittel
-
Isobe, Takanori;
Zhang, Long;
Tadano, Hiroshi;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2016)
Control of DC-capacitor peak voltage in reduced capacitance single-phase STATCOM.
Vitenskapelig kapittel
-
Rygg, Atle;
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Gustavsen, Bjørn Alfred.
(2016)
Apparent impedance analysis: A new method for power system stability analysis.
Vitenskapelig kapittel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Cai, Xu;
Chen, Zhang.
(2016)
A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2016)
Stability Analysis and Dynamic Performance Evaluation of a Power Electronics-Based DC Distribution System with Active Stabilizer.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta;
Soloot, Amir Hayati.
(2016)
STABILITY INFLUENCE OF RENEWABLE ENERGY SYSTEMS: CONNECTION TO DC NANOGRIDS.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2016)
Frequency Domain Stability Analysis of MMC-Based HVdc for Wind Farm Integration.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Cai, Xu;
Chen, Zhang.
(2016)
Frequency-dependent source and load impedances in power systems based on power electronic converters.
Vitenskapelig kapittel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2016)
Real-time stability analysis of power electronic systems.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Comparative study of semiconductor devices based on a meta-parameterised approach: SiC MOSFET vs Si IGBT technologies.
Vitenskapelig kapittel
-
Amin, Mohammad;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2016)
Active power flow direction effect on stability in multi-terminal VSC-HVDC transmission system in integrating wind farm.
Vitenskapelig kapittel
-
Skjong, Espen;
Volden, Rune;
Rødskar, Egil;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Cunningham, Joseph.
(2016)
Past, Present and Future Challenges of the Marine Vessel's Electrical Power System.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Agheb, Edris;
Holtsmark, Nathalie Marie-Anna;
Hoidalen, Hans Kristian;
Molinas Cabrera, Maria Marta.
(2016)
High frequency wind energy conversion system for offshore DC collection grid—Part I: Comparative loss evaluation.
Sustainable Energy, Grids and Networks
Vitenskapelig artikkel
-
Holtsmark, Nathalie Marie-Anna;
Agheb, Edris;
Molinas Cabrera, Maria Marta;
Hoidalen, Hans Kristian.
(2016)
High frequency wind energy conversion system for offshore DC collection grid — Part II: Efficiency improvements.
Sustainable Energy, Grids and Networks
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Saublet, Louis-Marie;
Ghoachani, Roghayeh;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Energy management and stabilization of a hybrid DC microgrid for transportation applications.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Stability analysis of hybrid AC/DC power systems for more electric aircraft.
Vitenskapelig kapittel
-
Zadeh, Mehdi;
Molinas, Marta Maria Cabrera.
(2016)
Stability Analysis Methods and Tools for Power Electronics- Based DC Distribution Systems, Applicable to On-Board Electric Power Systems and Smart Microgrids.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2016)
Understanding the origin of oscillatory phenomena observed between wind farms and HVdc systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Meta-parameterisation of power semiconductor devices for studies of efficiency and power density in high power converters.
Vitenskapelig kapittel
-
See, Phen Chiak;
Fosso, Olav B;
Wong, Kuan Yew;
Molinas Cabrera, Maria Marta.
(2016)
Flow-Based Forward Capacity Mechanism: An Alternative to the regulated Capacity Remuneration Mechanisms in Electricity Market With High RES Penetration.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Cai, Xu.
(2016)
Impact of Power Flow Direction on the Stability of VSC-HVDC Seen from the Impedances Nyquist Plot.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Skjong, Espen;
Suul, Jon Are Wold;
Rygg, Atle;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta.
(2016)
System-Wide Harmonic Mitigation in a Diesel Electric Ship by Model Predictive Control.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Cardenas, Rene Alexander Barrera;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Optimal Design of Air-Core Inductor for
Medium/High Power DC-DC Converters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Kulia, Geir;
Ram, Sumit Kumar.
(2016)
On wind Turbine failure detection from measurements of
phase currents: a permutation entropy approach.
Cornell University Library, arXiv.org
Forskningsrapport
-
Skjong, Espen;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2016)
Optimal Compensation of Harmonic Propagation in a Multi-Bus Microgrid.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Lundheim, Lars Magne;
Larsen, Bjørn B..
(2016)
Towards a real-time measurement platform for microgrids in isolated communities.
Procedia Engineering
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Discrete-Time Modeling, Stability Analysis, and Active Stabilization of DC Distribution Systems with Multiple Constant Power Loads.
IEEE transactions on industry applications
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta.
(2016)
Offshore wind farms, Technologies, Design and Operation.
Woodhead Publishing Limited
Faglig monografi
2015
-
Mandelli, Stefano;
Molinas Cabrera, Maria Marta;
Park, Eugene;
Leonardi, Matteo;
Colombo, Emanuela;
Merlo, Marco.
(2015)
The role of storage in emerging country scenarios.
Energy Procedia
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing.
(2015)
Oscillatory phenomena between wind farms and HVDC systems: The impact of control.
Vitenskapelig kapittel
-
Cisneros, Rafael;
Pirro, Matteo;
Bergna, Gilbert;
Ortega, Romeo;
Ippoliti, Gianluca;
Molinas Cabrera, Maria Marta.
(2015)
Global tracking passivity-based PI control of bilinear systems: Application to the interleaved boost and modular multilevel converters.
Control Engineering Practice
Vitenskapelig artikkel
-
Filippini, Mattia;
Molinas Cabrera, Maria Marta;
Oregi, Eneko Olea.
(2015)
A flexible power electronics configuration for coupling renewable energy sources.
Electronics (Basel)
Vitenskapelig artikkel
-
Skjong, Espen;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2015)
Optimized current reference generation for system-level harmonic mitigation in a diesel-electric ship using non-linear model predictive control.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2015)
Dynamic analysis of an on-board DC distribution
system with active stabilizer.
Vitenskapelig kapittel
-
Skjong, Espen;
Rødskar, Egil;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Cunningham, Joseph.
(2015)
The Marine Vessel’s Electrical Power System: From its Birth to Present Day.
Proceedings of the IEEE
Vitenskapelig oversiktsartikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2015)
Large Signal Stability Analysis at the Common Coupling Point of a DC Microgrid: A Grid Impedance Estimation Approach based on a Recursive Method.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Cisneros, R;
Pirro, M;
Bergna Diaz, Gilbert;
Ortega, R.;
Ippoliti, G.;
Molinas Cabrera, Maria Marta.
(2015)
Global tracking passivity-based pi control of bilinear systems and its application to the boost and modular multilevel converters.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Rygg, Atle;
Skjong, Espen;
Molinas Cabrera, Maria Marta.
(2015)
Handling system harmonic propagation in a diesel-electric ship with an active filter.
Electrical Systems for Aircraft, Railway and Ship Propulsion
Vitenskapelig artikkel
-
Thams, Florian;
Suul, Jon Are Wold;
D'Arco, Salvatore;
Molinas Cabrera, Maria Marta;
Fuchs, Friedrich W.
(2015)
Stability of DC voltage droop controllers in VSC HVDC systems.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2015)
Comparative study of wind turbine power converters based on medium-frequency AC-link for offshore DC-grids.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Skjong, Espen;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Volden, Rune.
(2015)
Shaping the current waveform of an active filter for optimized system level harmonic conditioning.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2015)
Discrete-time Modelling, Stability Analysis, and Active Stabilization of DC Distribution Systems With Constant Power Loads.
IEEE Applied Power Electronics Conference and Exposition (APEC)
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2015)
Impedance based stability analysis of VSC-based HVDC system.
Vitenskapelig kapittel
-
Skjong, Espen;
Ochoa-Gimenez, Miguel;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2015)
Management of harmonic propagation in a marine vessel by use of optimization.
Vitenskapelig kapittel
-
Mandelli, Stefano;
Merlo, Marco;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2015)
Electri-Mechanical Model for Understanding the Operation and Dynamic Behavior of a Micro-Grid: a case study in Tanzania.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
D'Arco, Salvatore;
Rodriguez, P;
Molinas Cabrera, Maria Marta.
(2015)
Extended stability range of weak grids with voltage source converters through impedance – conditioned grid synchronization.
Vitenskapelig kapittel
-
Amin, Mohammad;
Suul, Jon Are Wold;
D'Arco, Salvatore;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2015)
Impact of state-space modelling fidelity on the small-signal
dynamics of VSC-HVDC systems.
Vitenskapelig kapittel
2014
-
Zeiner, Ingerid;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2014)
Competitiveness of Grid Connected Photovoltaic Power Supply for a Desalination Plant under a Prospective Power Market in Paraguay.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Amin, Mohammad;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2014)
Small-Signal Stability Study of the Cigré DC Grid Test System with Analysis of Participation Factors and Parameter Sensitivity of Oscillatory Modes.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Ortega, Romeo;
Grino, Robert;
Bergna Diaz, Gilbert;
Molinas Cabrera, Maria Marta.
(2014)
Conditions for existence of equilibria of systems with constant power loads.
IEEE Transactions on Circuits and Systems I: Regular Papers
Vitenskapelig artikkel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta;
Isobe, Takanori;
Shimada, Ryuichi.
(2014)
Transformer-Less Series Reactive/Harmonic Compensation of Line-Commutated HVDC for Offshore Wind Power Integration.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
D'Arco, Salvatore;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2014)
Implementation and Analysis of a Control Scheme for Damping of Oscillations in VSC-based HVDC Grids.
Vitenskapelig kapittel
-
Bergna-Diaz, Gilbert;
Suul, Jon Are Wold;
Berne, E;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2014)
MMC circulating current reference calculation in ABC frame by means of Lagrange Multipliers for ensuring constant DC power under unbalanced grid conditions.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2014)
A Discrete-Time Tool to Analyze the Stability of Weakly Filtered Active Front-End PWM Converters.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Martin, Jean-Philippe;
Molinas Cabrera, Maria Marta.
(2014)
A New Discrete-Time Modelling of PWM Converters for Stability Analysis of DC Microgrid.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2014)
Self-sustained all-electric wave energy converter system.
Compel
Vitenskapelig artikkel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2014)
Asymmetrical fault ride through as ancillary service by constant power loads in grid-connected wind farm.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2014)
Degree of influence of system states transition on the stability of a DC microgrid.
IEEE Transactions on Smart Grid
Vitenskapelig artikkel
-
Bergna Diaz, Gilbert;
Sanchez Acevedo, Santiago;
Berne, E;
Egrot, Phillipe;
Vannier, J.C;
Molinas Cabrera, Maria Marta.
(2014)
Frequency Scanning of Power Electronic-based Smart Grids: The Modular Multilevel Converter Application.
Vitenskapelig kapittel
-
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Sand, Kjell;
Coldevin, Grete Håkonsen.
(2014)
Moving towards the Smart Grid: The Norwegian Case.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, G;
Molinas Cabrera, Maria Marta.
(2014)
Reliability Analysis of IGBT Inverter for Wave Energy Converter with Focus on Thermal Cycling.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Bergna Diaz, Gilbert;
Berne, E;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2014)
Frequency Scanning of Power Electronic-based Smart Grids: The Modular Multilevel Converter.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2014)
Power Quality Enhancement by Power Electronic Generation Interface under Non-Ideal Voltage Conditions.
Vitenskapelig kapittel
-
Bergna Diaz, Gilbert;
Garces Ruiz, Alejandro;
Berne, E;
Egrot, P;
Arzande, A;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2014)
A generalized power control approach in ABC frame for modular multilevel converter HVDC links based on mathematical optimization.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Zeiner, Ingerid;
Suul, Jon Are Wold;
Marcos, Aldo;
Molinas Cabrera, Maria Marta.
(2014)
System design and load profile shaping for a Reverse Osmosis desalination plant powered by a stand-alone PV system in Pozo Colorado, Paraguay.
Vitenskapelig kapittel
-
Løtveit, Marte Wiig;
Suul, Jon Are Wold;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2014)
A study of biomass in a hybrid stand-alone Micro-Grid for the rural village of Wawashang, Nicaragua.
Vitenskapelig kapittel
-
Amin, Mohammad;
Zadeh, Mehdi Karbalaye;
Suul, Jon Are Wold;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2014)
Stability analysis of interconnected AC power systems with multi-terminal DC grids based on the Cigré DC grid test system.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta;
Degano, Marco;
Zanchetta, Pericle.
(2014)
Stability evaluation of a DC micro-grid and future interconnection to an AC system.
Renewable Energy
Vitenskapelig artikkel
2013
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2013)
Matrix converter modulation for series-connected wind turbines with high frequency link.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2013)
Grid integration: part I - Power system interactions of wave energy generators.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta;
Ringwood, John V..
(2013)
Control systems - design and implementation.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2013)
Thermal analysis of matrix and Back-To-Back converters for series-connected wind turbines.
Vitenskapelig kapittel
-
Wessels, C;
Hoffmann, N;
Molinas Cabrera, Maria Marta;
Fuchs, Friedrich W.
(2013)
StatCom Control at Wind Farms With Fixed-Speed Induction Generators Under Asymmetrical.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2013)
Mitigation of Asymmetrical Grid Faults in Induction Generator-Based Wind Turbines Using Constant Power Load.
Energies
Vitenskapelig artikkel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2013)
A Transformerless Series Reactive/Harmonic Compensator for Line-Commutated HVDC for Grid Integration of Offshore Wind Power.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
A Controllable Distributed Energy Resource with Active Filtering Capability Based on Online Harmonic Detection.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Parseh, Reza;
Molinas Cabrera, Maria Marta;
Kansanen, Kimmo.
(2013)
Bifurcation in PWM Converter-based Systems with Wireless Communication-based Current Controller.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2013)
Seamless Control of Distributed Multi-Converter System with High Power Quality.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
Stability Assessment of Distributed MultiConverter Systems in Automated Grid.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta;
Bolognani, S.
(2013)
Reactive Power Ancillary Service by Constant Power Loads in Distributed AC Systems.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Vatani, Mohsen;
Hovd, Morten;
Molinas Cabrera, Maria Marta.
(2013)
Finite Control Set Model Predictive Control of a Shunt Active Power Filter.
IEEE Applied Power Electronics Conference and Exposition (APEC)
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
Multi-objective Design of a Modular Power Converter Based on Medium Frequency AC-Link for Offshore DC Wind Park.
Energy Procedia
Vitenskapelig artikkel
-
Sjolte, Jonas;
Bjerke, Ida Kathrine;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2013)
Summary of Performance After One Year of Operation with the Lifesaver Wave Energy Converter System.
Proceedings of the European Wave and Tidal Energy Conference (EWTEC)
Vitenskapelig artikkel
-
Holtsmark, Nathalie;
Bahirat, Himanshu;
Molinas Cabrera, Maria Marta;
Mork, BA;
Høidalen, Hans Kristian.
(2013)
An All-DC Offshore Wind Farm With Series-Connected Turbines: An Alternative to the Classical Parallel AC Model?.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
Stability Analysis of Distributed Multi-Converter System.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Bergna, Gilbert;
Berne, E;
Egrot, P;
Lefranc, P;
Arzande, A;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
An Energy-Based Controller for HVDC Modular Multilevel Converter in Decoupled Double Synchronous Reference Frame for Voltage Oscillation Reduction.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Sjolte, Jonas;
Sandvik, Christian Mclisky;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2013)
Exploring the Potential for Increased Production from the Wave Energy Converter Lifesaver by Reactive Control.
Energies
Vitenskapelig artikkel
-
Nysveen, Arne;
Molinas Cabrera, Maria Marta.
(2013)
Electric systems for Pumped Storage Plants.
SINTEF Energi AS
Forskningsrapport
-
Tedeschi, Elisabetta;
Sjolte, Jonas;
Molinas Cabrera, Maria Marta;
Santos, Maider.
(2013)
Stochastic Rating of Storage Systems in Isolated Networks withIncreasing Wave Energy Penetration.
Energies
Vitenskapelig artikkel
-
Bergna, Gilbert;
Berne, E;
Garces Ruiz, Alejandro;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
A generalized power control approach in ABC frame for modular multilevel converters based on Lagrange multipliers.
Vitenskapelig kapittel
-
Boninella, Marco;
Solheim, Linn;
Molinas Cabrera, Maria Marta.
(2013)
Hybrid micro grid feasibility study for the Wawashang Complex in Nicaragua.
Vitenskapelig kapittel
-
Sagosen, Øystein;
Molinas Cabrera, Maria Marta.
(2013)
Large scale regional adoption of electric vehicles in Norway and the potential for using wind power as source.
Vitenskapelig kapittel
-
See, Phen Chiak;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Foosnæs, Jan Andor.
(2013)
A method for optimizing the offer price of collaborative power generators.
Vitenskapelig kapittel
-
Allard, Stephane;
See, Phen Chiak;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Foosnæs, Jan Andor.
(2013)
Electric Vehicles Charging in a Smart Microgrid Supplied with Wind Energy.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
A comparison of WECS based on medium frequency AC-link for offshore DC Wind Park.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
Optimal control for an HVDC system with series connected offshore wind turbines.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Parseh, Reza;
Molinas Cabrera, Maria Marta;
Kansanen, Kimmo.
(2013)
Modeling and Simulation of Wireless Communication Based Robust Controller for Multi-Converter Systems.
Vitenskapelig kapittel
-
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Bialasiewicz, JT.
(2013)
Introduction to the Special Section on Control and Grid Integration of Wind Energy Systems-Part II.
IEEE transactions on industrial electronics (1982. Print)
Leder
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2013)
Power Collection from Wave Energy Farms.
Applied Sciences
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Zahedi, Bijan;
Molinas Cabrera, Maria Marta;
Norum, Lars.
(2013)
Centralized Stabilizer for Marine DC Microgrid.
Vitenskapelig kapittel
-
Nysveen, Arne;
Molinas Cabrera, Maria Marta.
(2013)
Electric systems for Pumped Storage PlantsTechnology Evaluation.
SINTEF Energi AS
Forskningsrapport
-
Sanchez Acevedo, Santiago;
Ortega, Romeo;
Bergna, Gilbert;
Molinas Cabrera, Maria Marta;
Grino, Robert.
(2013)
Conditions for Existence of Equilibrium Points of Systems with Constant Power Loads.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2013)
Evaluation of the system parameters degree of influence on the stability of a DC microgrid.
Vitenskapelig kapittel
-
Torres Olguin, Raymundo E.;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2013)
Integration of Offshore Wind Farm Using a Hybrid HVDC Transmission Composed by the PWM Current-Source Converter and Line-Commutated Converter.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Estala, Eleder Araneta;
Molinas Cabrera, Maria Marta;
Tedeschi, Elisabetta.
(2013)
A Modular Simulation Platform for Testing Hybrid DC/AC Future Grid Solutions for Remote Areas.
Vitenskapelig kapittel
-
Makai, Likonge;
Molinas Cabrera, Maria Marta.
(2013)
Biogas – An Alternative Household Cooking Technique for Zambia.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, E;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
Generalized ABC Frame Differential Current Control ensuring constant DC Power for Modular Multilevel Converters under Unbalanced Operation.
Vitenskapelig kapittel
-
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Bialasiewicz, JT.
(2013)
Introduction to the Special Section on Control and Grid Integration of Wind Energy Systems-Part I.
IEEE transactions on industrial electronics (1982. Print)
Leder
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Egrot, Philippe;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2013)
Analysis of Modular Multilevel Converters under Unbalanced Grid Conditions with different Load Current Control Strategies and Lagrange-based Differential Current Control.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Graces, Alejandro;
Berne, Erik;
Egrot, Philippe;
Arzande, Amir;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2013)
Improving the Dynamics of Lagrange-based MMC Controllers by means of Adaptive Filters for Single-Phase Voltage, Power and Energy Estimation.
Vitenskapelig kapittel
-
See, Phen Chiak;
Su, Vin Cent;
Molinas Cabrera, Maria Marta.
(2013)
A binary ACO for controlling all-electric power take off system in wave energy converters.
International Journal of Renewable Energy Technology
Vitenskapelig artikkel
2012
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Converter Connected in Array with Common DC-Link for Improved Power Quality.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Converter Array with Energy Storage and Reactive Power Compensation for Improved Power Quality.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Bjerke, Ida Kathrine;
Crozier, Aina;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Power Take Off System with Improved Power Quality at the Grid Connection Point.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Identifying Unstable Region of Operation in a Micro-grid System.
Energy Procedia
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Comparison of Wind Energy Conversion Systems based on High frequency AC-Link: Three-phase Vs. Single-phase.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Assessment of a stability analysis tool for constant power loads in dc-grids.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Molinas Cabrera, Maria Marta;
Tjensvoll, Gaute;
Sørby, Bernt.
(2012)
Annual Energy and Power Quality from an All-Electric Wave Energy Converter Array.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Extending the reactive compensation range of a direct AC-AC FACTS device for offshore grids.
Electric power systems research
Vitenskapelig artikkel
-
Su, Vin Cent;
See, Phen Chiak;
Merle, S.;
Molinas Cabrera, Maria Marta.
(2012)
Sizing and control of the electric power take-off for a buoy type point absorber wave energy converter.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
A Matrix converter-interfaced PM Generator System with Active Filtering Capabilities.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
A Current-Coupled Topology for Grid Integration of Wind Turbines in Micro-Grids.
Vitenskapelig kapittel
-
Torres Olguin, Raymundo E.;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2012)
Integration of Offshore Wind Farm using a Hybrid HVDC Transmission Composed by PWM Current-Source Converter and Line-Commutated Converter.
Asia-Pacific Power and Energy Engineering Conference
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
Coordinated control of series-connected offshore wind park based on matrix converters.
Wind Energy
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
A Study of Efficiency in a Reduced Matrix Converter for Offshore Wind Farms.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Egrot, Philippe;
Lefranc, Pierre;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2012)
Mitigating DC-side power oscillations and negative sequence load currents in Modular Multilevel Converters under unbalanced faults - first approach using resonant PI.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Speed regulation of a wind turbine with current source or matrix converter: Tuning procedure.
Vitenskapelig kapittel
-
Acevedo, SS;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
A Current-Coupled Topology for Grid Integration of Wind Turbines in Micro-Grids.
Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference
Vitenskapelig artikkel
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2012)
Properties of reactive current injection by AC power electronic systems for loss minimization.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2012)
Transformer-less Series Voltage Injection for Reactive Power Compensation of Line-Commutated HVDC.
Vitenskapelig kapittel
-
Abildgaard, Elisabeth Nøkleby;
Molinas Cabrera, Maria Marta.
(2012)
Modelling and Control of the Modular Multilevel Converter (MMC).
Energy Procedia
Vitenskapelig artikkel
-
See, Phen Chiak;
Su, Vin Cent;
Molinas Cabrera, Maria Marta.
(2012)
Ant colony optimization applied to control of ocean wave energy converters.
Energy Procedia
Vitenskapelig artikkel
-
Torres Olguin, Raymundo E.;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2012)
Offshore Wind Farm Grid Integration by VSC Technology With LCC-Based HVDC Transmission.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Ulvin, Johannes Christopher Bedos;
Molinas Cabrera, Maria Marta;
Sjolte, Jonas.
(2012)
Analysis of the Power Extraction Capability for the Wave Energy Converter BOLT (R).
Energy Procedia
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Assessing the validity of a propose stability analysis method in a three phase system with constant power load.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Comparative study of the efficiency and power density of offshore WECS with three-phase AC-link.
Vitenskapelig kapittel
-
Serena, Alberto;
Molinas Cabrera, Maria Marta;
Cobo, I.
(2012)
Design of a Direct Drive Wave Energy Conversion System for the Seaquest Concept.
Energy Procedia
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Optimal LQG Controller for Variable Speed Wind Turbine Based on Genetic Algorithms.
Energy Procedia
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Optimized design of wind energy conversion systems with single-phase AC-link.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
A Simple Procedure to Evaluate the Efficiency and Power Density of Power Conversion Topologies for Offshore Wind Turbines.
Energy Procedia
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Evaluation of Non-active Current Compensation in Smart Grids.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Comparative study of the converter efficiency and power density in offshore wind energy conversion system with single-phase transformer.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Loss comparison of matrix and back-to-back converters for offshore WECS.
Vitenskapelig kapittel
-
Vatne, Åshild;
Molinas Cabrera, Maria Marta;
Foosnæs, Jan Andor.
(2012)
Analysis of a Scenario of Large Scale Adoption of Electrical Vehicles in Nord-Trondelag.
Energy Procedia
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Rodríguez, Pedro.
(2012)
A generalized compensation theory for active filters based on mathematical optimization in ABC frame.
Electric power systems research
Vitenskapelig artikkel
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Rodríguez, Pedro.
(2012)
Exploring the Range of Impedance Conditioning by Virtual Inductance for Grid Connected Voltage Source Converters.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2012)
Tunable Control Strategy for Wave Energy Converters With Limited Power Takeoff Rating.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
2011
-
Wessel, Christian;
Fuchs, Freidrich W.;
Molinas Cabrera, Maria Marta.
(2011)
Voltage Control of a StatCom at a Fixed Speed Wind Farm under Unbalanced Grid Faults.
Proceedings of the Annual Conference of the IEEE Industrial Electronics Society (IECON)
Vitenskapelig artikkel
-
Santos, M.;
Tedeschi, Elisabetta;
Ricci, P;
Molinas Cabrera, Maria Marta;
Martin, J.
(2011)
Grid Connection Improvements by Control Strategy Selection for Wave Energy Converters.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2011)
A flexible and optimal power theory for reactive power compensation in ABC frame.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2011)
Matrix Converter Efficiency in a High Frequency Link Offshore WECS.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2011)
Power Electronics Modeling Fidelity: Impact on Stability Estimate of Micro-grid Systems.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta;
Tenti, Paulo.
(2011)
Application of Conservative Power Theory for Active Power Filtering og Line-Commutated HVDC for Offshore Wind Power.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Santos, M.;
Ricci, P;
Molinas Cabrera, Maria Marta;
Villate, J.
(2011)
Control Strategies for Grid Integration of Wave Energy Converters at the BIscay Marine Energy Platform.
EWTEC 2011,
Forskningsrapport
-
Torres Olguin, Raymundo E.;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2011)
A direct power control for Hybrid HVDC transmission systems.
Vitenskapelig kapittel
-
Bracco, Giovanni;
Giorcelli, Ermanno;
Mattiazzo, Giuliana;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2011)
Control Strategies for the ISWEC Wave Energy System.
EWTEC 2011
Forskningsrapport
-
Liserre, Marco;
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Rodríguez, José F..
(2011)
Overview of Multi-MW Wind Turbines and Wind Parks.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2011)
Wave-to-Wave Buoys Control for Improved Power Extraction under Electro-Mechanical Constraints.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2011)
Loss Minimization in AC Distribution System with High Share of Power Electronic Loads Providing Ancillary Reactive Power.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2011)
Stability Investigation of Control System for Power Electronic Converter Acting as Load Interface in AC Distribution System.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2011)
Reactive Power Compensation Capability of a Matrix Converter-based FACTS Device.
Vitenskapelig kapittel
-
Liserre, Marco;
Dobson, Roberto Cardenas;
Molinas Cabrera, Maria Marta;
Rodriguez, Jose M.
(2011)
Overview of Multi-MW wind turbines and wind parks.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Carraro, Matteo;
Molinas Cabrera, Maria Marta;
Mattavelli, Paolo.
(2011)
Effect of Control Strategies and Power Take-Off Efficiency on the Power Capture From Sea Waves.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Toh, Chuen Ling;
Molinas Cabrera, Maria Marta;
Norum, Lars Einar.
(2011)
Regulated DC Link Voltage with Smaller DC Link Capacitor in Peng's Generalized Theory of Instantaneous Reactive Power.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2011)
Modeling of Switching Power Interfaces for Smart-Grid Stability Studies.
Vitenskapelig kapittel
2010
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
High Frequency Wind Energy Conversion from the Ocean.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Impact of Operation Principle on the Losses of a Reduced Matrix Converter for Offshore Wind Parks.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Tedeschi, Elisabetta;
Verez, Guillaume;
Molinas, Marta.
(2010)
Power Collection Array for Improved Wave Farm Output based on Reduced Matrix Converters.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Comparative Investigation of Losses in a Reduced Matrix Converter for Off-Shore Wind Turbines.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Carraro, Matteo;
Mattavelli, Paolo;
Molinas, Marta.
(2010)
Analysis of Power Extraction from Irregular Waves by All-Electric Power Take Off.
Vitenskapelig kapittel
-
Molinas, Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2010)
Extending the Life of Gear Box in Wind Generators by Smoothing Transient Torque With STATCOM.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Astad, Kristian Prestrud;
Molinas Cabrera, Maria Marta.
(2010)
Direct AC/AC power converter for wind power application.
IEEE Mediterranean Electrotechnical Conference
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2010)
Impact of control strategies on the rating of electric poewer take off for wave energy conversion.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2010)
Control Strategies of Wave Energy Converters Optimized under Power Electronics Rating Constraints.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Reduced Matrix Converter Operated as Current Source for Off-Shore Wind Farms.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
Molinas, Marta;
Undeland, Tore Marvin.
(2010)
STATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid Faults.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Danielsen, Steinar;
Fosso, Olav B;
Molinas, Marta;
Suul, Jon Are Wold;
Toftevaag, Trond.
(2010)
Simplified models of a single-phase power electronic inverter for railway power system stability analysis—Development and evaluation.
Electric power systems research
Vitenskapelig artikkel
-
Nielsen, Knut Erik;
Molinas, Marta.
(2010)
Superconducting magnetic energy storage (SMES) in power systems with renewable energy sources.
Vitenskapelig kapittel
-
Hanssen, Mari Røed;
Molinas, Marta;
Garces Ruiz, Alejandro.
(2010)
Operation features of a reduced matrix converter for offshore wind power.
Vitenskapelig kapittel
-
Astad, Kristian Prestrud;
Molinas, Marta.
(2010)
Double input AC/AC nine-switch converter for multiple-generator drivetrain configuration in wind turbines.
Vitenskapelig kapittel
-
Astad, Kristian Prestrud;
Molinas, Marta.
(2010)
Direct AC/DC Power Converter for Wind Power Application.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas, Marta.
(2010)
Reactive power compensation using an indirectly space vector-modulated matrix converter.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas, Marta.
(2010)
Optimal use of power electronic interfaces for loads in distributed systems.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas, Marta.
(2010)
A series injection strategy for reactive power compensation of line commutated HVDC for offshore wind power.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas, Marta.
(2010)
Forced commutation through series voltage injection for reactive power reduction of line commutated HVDC converter terminal.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2010)
nnnnnn.
Vitenskapelig kapittel
2009
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Effects and Mitigation of Post-Fault Commutation Failures in Line-Commutated HVDC Transmission System.
Vitenskapelig kapittel
-
Danielsen, Steinar;
Molinas Cabrera, Maria Marta;
Assefa, Hana Yohannes.
(2009)
Impact of PWM Switching on Modeling of Low Frequency Power Oscillation in Electrical Rail Vehicle.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2009)
Voltage Regulation by Loads: Reactive Power Ancillary Service in Distributed Systems: Analytical and Experimental Studies.
Japan Society for the Promotion of Science, Japan
Forskningsrapport
-
Danielsen, Steinar;
Molinas Cabrera, Maria Marta;
Toftevaag, Trond;
Fosso, Olav B.
(2009)
Constant power load charecteristic's influence on the low-frequency interaction between advanced electrical rail vehicle and railway traction power supply with rotary converters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Kondoh, Junji.
(2009)
Power Electronic Loads as Providers of Reactive Power Ancillary Service to the Grid: Analytical and Experimental study.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Ride-Through Enhancement of Line-Commutated HVDC Link for Large Offshore Wind Parks.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Improvement in Reactive Power Consumption of Line Commutated HVDC Converters for Integration of Offshore Wind-Power.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Kondoh, Junji.
(2009)
Power Electronic Loads as Providers of Reactive Power Ancillary Service to the Grid: Analytical and Experimental Study.
Vitenskapelig kapittel
2008
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Norum, Lars Einar;
Undeland, Tore Marvin.
(2008)
Tuning of Control Loops for Grid Connected Voltage Source Converters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Low Voltage Ride Through of Wind Farms With Cage Generators: STATCOM Versus SVC.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Wiik, Jan Arild;
Kulka, Arkadiusz;
Isobe, Takanori;
Usuki, Kazuhiro;
Molinas Cabrera, Maria Marta;
Takaku, Taku;
Undeland, Tore Marvin;
Shimada, Ryuichi.
(2008)
Loss and Rating Considerations of a Wind Energy Conversion System with Reactive Compensation by Magnetic Energy Recovery Switch (MERS).
EPE Journal: European Power Electronics and Drives
Vitenskapelig artikkel
-
Mogstad, Anne Berit;
Molinas Cabrera, Maria Marta;
Olsen, Pål Keim;
Nilssen, Robert.
(2008)
A Power Conversion System for Offshore Wind Parks.
Vitenskapelig kapittel
-
Wiik, Jan Arild;
Kulka, Arkadiusz;
Isobe, Takanori;
Usuki, Kazuhiro;
Molinas Cabrera, Maria Marta;
Takaku, Taku;
Undeland, Tore Marvin;
Shimada, Ryuichi.
(2008)
Control Design and Experimental Verification of a Series Compensated 50 kW Permanent Magnet Wind Power Generator.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Moltoni, Duilio;
Fascendini, G.;
Suul, Jon Are Wold;
Faranda, R.;
Undeland, Tore Marvin.
(2008)
Investigation on the Role of Power Electronic Controlled Constant Power Loads for Voltage Support in Distributed AC Systems.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Moltoni, Duilio;
Fascendini, Gabrielle;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Constant power loads in AC distribution systems: An investigation of stability.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Torque transient alleviation in fixed speed wind generators by Indirect Torque Control with STATCOM.
Vitenskapelig kapittel
2007
-
Molinas Cabrera, Maria Marta;
Skjervheim, Ottar;
Andreassen, Pål;
Undeland, Tore Marvin;
Hals, Jørgen;
Moan, Torgeir;
Sørby, Bernt.
(2007)
Power Electronics as Grid Interface for Actively Controlled Wave Energy Converters.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2007)
A Simple Method for Analytical Evaluation of LVRT in Wind Energy for Induction Generators with STATCOM or SVC.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2007)
Improved Grid Interface of Induction Generators for Renewable Energy by use of STATCOM.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Skjervheim, Ottar;
Sørby, Bernt;
Andreassen, Pål;
Lundberg, S.;
Undeland, Tore Marvin.
(2007)
Power Smoothing by Aggregation of Wave Energy Converters for Minimizing Electrical Energy Storage Requirements.
Vitenskapelig kapittel
2006
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2006)
Wind Farms with Increased Transient Stability Margin Provided by a STATCOM.
Vitenskapelig kapittel
-
Næss, Bjarne Idsøe;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2006)
Laboratory Tests of Ride Through for Doubly Fed Induction Generators.
Wind Power Conference
Forskningsrapport
-
Næss, Bjarne Idsøe;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2006)
Explanation of Induction Machine with Wound Rotor, Voltage Drops at the Stator Terminals.
Nordic Wind Power
Forskningsrapport
-
Chicco, Gianfranco;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin;
Viglietti, Giovanni.
(2006)
Improvement of the Transient Stability Margin in Wind Systems with a STATCOM.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Næss, Bjarne Idsøe;
Gullvik, William;
Undeland, Tore Marvin.
(2006)
Robust Wind Turbine System Against Voltage Sag with Induction Generators Interfaced to the Grid by Power Electronic Converters.
IEEJ Transactions on Industry Applications
Vitenskapelig artikkel
2005
-
Molinas Cabrera, Maria Marta;
Vazquez, S;
Takaku, T;
Carrasco, J.M.;
Shimada, R;
Undeland, Tore Marvin.
(2005)
Improvement of Transient Stability Margin in Power Systems with Integrated Wind Generation Using a STATCOM: An Experimental Verificaton.
Vitenskapelig kapittel
1999
-
Amin, Mohammad;
Zhang, Chen;
Rygg, Atle;
Unamuno, Eneko;
Molinas Cabrera, Maria Marta;
Belkhayat, Mohamed.
(1999)
Nyquist Stability Criterion and its Application to Power Electronic Systems.
Kapittel i oppslagsverk
Tidsskriftspublikasjoner
-
Shah, Chirag R.;
Norambuena, Margarita;
Molinas, Marta;
Rodriguez, Jose;
Føyen, Sjur;
Nilsen, Roy.
(2026)
Impedance-based Stability Characterization of Extended Finite Control Set MPC under Realistic Switching Constraints.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Yang, Ling;
Zhu, Difan;
He, Qijun;
Li, Jiewen;
Lian, Chenxi;
Wang, Yu;
Chen, Bing;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2026)
Frequency-Coupling Suppression Strategy for Grid-Connected Inverter Based on DC Voltage Loop Q-Axis Compensation.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Xiao, Yi;
Luo, Hao;
Yang, Yongheng;
Ruan, Hao;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede;
Loo, Ka Hong.
(2026)
Low-Frequency Oscillation Mechanism and Mitigation in Grid-Forming Inverters With Voltage Controller Effects.
IEEE transactions on industry applications
Vitenskapelig artikkel
-
Zong, Haoxiang;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2025)
An Augmented Impedance Network Modeling Method with Explicit Synchronization Port for Stability Assessment of Multi-Converter System.
Journal of Modern Power Systems and Clean Energy
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2025)
From high- to low-density EEG for automatic classification of dream experiences during stage 2 of NREM.
SLEEP Advances
Vitenskapelig artikkel
-
Bing, Tian;
Wang, Quan;
Zhang, Guoqiang;
Molinas Cabrera, Maria Marta;
Wei, Jiadan;
Zhang, Zhuoran.
(2025)
A Sensorless Control for Five-Phase PMSMs Based on a Hybrid-Speed Estimator, Operating under Both Healthy and Single-Phase Open-Fault Conditions.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Torgersen, Eline Lyngaas;
Ragnarson, Ingrid;
Molinas Cabrera, Maria Marta.
(2025)
Decoding Attention through EEG: Paving the Way for BCI Applications in Attention-Related Disorders.
IEEE Engineering in Medicine and Biology Society. Conference Proceedings
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Bana, Prabhat Ranjan;
Føyen, Sjur;
Nilsen, Roy.
(2025)
Unveiling Stability Insights of Model Predictive Current Control in Voltage Source Converter through Impedance Analysis.
International Conference on Clean Electrical Power
Konferanseabstract
-
Haring, Mark;
Skjong, Espen;
Johansen, Tor Arne;
Molinas, Marta.
(2019)
Extremum-Seeking Control for Harmonic Mitigation in Electrical Grids of Marine Vessels.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Mandelli, Stefano;
Molinas Cabrera, Maria Marta;
Park, Eugene;
Leonardi, Matteo;
Colombo, Emanuela;
Merlo, Marco.
(2015)
The role of storage in emerging country scenarios.
Energy Procedia
Vitenskapelig artikkel
-
Wessel, Christian;
Fuchs, Freidrich W.;
Molinas Cabrera, Maria Marta.
(2011)
Voltage Control of a StatCom at a Fixed Speed Wind Farm under Unbalanced Grid Faults.
Proceedings of the Annual Conference of the IEEE Industrial Electronics Society (IECON)
Vitenskapelig artikkel
-
Santos, M.;
Tedeschi, Elisabetta;
Ricci, P;
Molinas Cabrera, Maria Marta;
Martin, J.
(2011)
Grid Connection Improvements by Control Strategy Selection for Wave Energy Converters.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Zong, Haoxiang;
Zhang, Chen;
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2021)
Block Diagonal Dominance-Based Model Reduction Method Applied to MMC Asymmetric Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2022)
Static and dynamic eigenvalues in unified stability studies.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Debru, Abeba;
Kahsay, Mulu Bayray;
Molinas Cabrera, Maria Marta.
(2021)
ADAMA-II wind farm performance assessment in comparison to feasibility study.
Wind Engineering : The International Journal of Wind Power
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Abe, Takashi;
Molinas Cabrera, Maria Marta.
(2022)
Two-dimensional CNN-based distinction of human emotions from EEG channels selected by Multi-Objective evolutionary algorithm.
Scientific Reports
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta.
(2016)
Research Group Introduction: Marta Molinas’ “Cybernetics of Power Electronics Systems” Laboratory, Department of Engineering Cybernetics, Norwegian University of Science and Technology.
IEEJ Transactions on Industry Applications
Populærvitenskapelig artikkel
-
Teshome, Abeba Debru;
Kahsay, Mulu Bayray;
Molinas Cabrera, Maria Marta.
(2024)
Assessment of power curve performance of wind turbines in Adama-II Wind Farm.
Energy Reports
Vitenskapelig artikkel
-
Føyen, Sjur;
Zhang, Chen;
Zhang, Yu;
Isobe, Takanori;
Fosso, Olav Bjarte;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2023)
Frequency Scanning of Weakly Damped Single-Phase VSCs With Chirp Error Control.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Tian, Bing;
Wei, Jiadan;
Molinas Cabrera, Maria Marta;
Lu, Runze;
An, Quntao;
Zhou, Bo.
(2022)
Neutral Voltage Modeling and Its Remediation for Five-Phase PMSMs under Single-Phase Short-Circuit Fault Tolerant Control.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Ringwood, John V.;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
The impact of time-frequency estimation methods on the performance of wave energy converters under passive and reactive control.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Suul, Jon Are Wold;
D'Arco, Salvatore;
Rodríguez, Pedro;
Molinas Cabrera, Maria Marta.
(2016)
Impedance-compensated grid synchronisation for extending the stability range of weak grids with voltage source converters.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
Discussion on the mode mixing in wave energy control systems using the Hilbert-Huang transform.
Proceedings of the European Wave and Tidal Energy Conference (EWTEC)
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2018)
A meta-parameterized approach for the evaluation of semiconductor technologies - A comparison between SiC-MOSFET and Si-IGBT technologies-.
IEEJ Journal of Industry Applications
Vitenskapelig artikkel
-
Mandelli, Stefano;
Brivio, Claudio;
Leonardi, Matteo;
Colombo, Emanuela;
Molinas Cabrera, Maria Marta;
Park, Eugene;
Merlo, Marco.
(2016)
The role of electrical energy storage in sub-Saharan Africa.
Journal of Energy Storage
Vitenskapelig oversiktsartikkel
-
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2017)
Optimal Design of Controller Parameters for Improving the Stability of MMC-HVDC for Wind Farm Integration.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Wessels, C;
Hoffmann, N;
Molinas Cabrera, Maria Marta;
Fuchs, Friedrich W.
(2013)
StatCom Control at Wind Farms With Fixed-Speed Induction Generators Under Asymmetrical.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Identifying Unstable Region of Operation in a Micro-grid System.
Energy Procedia
Vitenskapelig artikkel
-
Soler, Andres;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2024)
EEG source imaging of hand movement-related areas: an evaluation of the reconstruction and classification accuracy with optimized channels.
Brain Informatics
Vitenskapelig artikkel
-
Cisneros, Rafael;
Pirro, Matteo;
Bergna, Gilbert;
Ortega, Romeo;
Ippoliti, Gianluca;
Molinas Cabrera, Maria Marta.
(2015)
Global tracking passivity-based PI control of bilinear systems: Application to the interleaved boost and modular multilevel converters.
Control Engineering Practice
Vitenskapelig artikkel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Extending the reactive compensation range of a direct AC-AC FACTS device for offshore grids.
Electric power systems research
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Kulia, Geir;
Ringwood, John V.;
Molinas Cabrera, Maria Marta.
(2017)
Real-Time Passive Control of Wave Energy Converters Using the Hilbert-Huang Transform.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Su, Vin Cent;
See, Phen Chiak;
Merle, S.;
Molinas Cabrera, Maria Marta.
(2012)
Sizing and control of the electric power take-off for a buoy type point absorber wave energy converter.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
A Matrix converter-interfaced PM Generator System with Active Filtering Capabilities.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Ortega, Romeo;
Grino, Robert;
Bergna Diaz, Gilbert;
Molinas Cabrera, Maria Marta.
(2014)
Conditions for existence of equilibria of systems with constant power loads.
IEEE Transactions on Circuits and Systems I: Regular Papers
Vitenskapelig artikkel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta;
Isobe, Takanori;
Shimada, Ryuichi.
(2014)
Transformer-Less Series Reactive/Harmonic Compensation of Line-Commutated HVDC for Offshore Wind Power Integration.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
AlSharabi, Khalil;
Alturki, Fahd A..
(2022)
Detection of Parkinson’s disease from EEG signals using discrete wavelet transform, different entropy measures, and machine learning techniques.
Scientific Reports
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta;
Sun, Jian.
(2017)
Guest editorial: Special issue on power electronics and systems: Modeling, analysis, control, and stability.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Leder
-
Tian, Bing;
An, Qun-Tao;
Molinas Cabrera, Maria Marta.
(2019)
High-Frequency Injection-Based Sensorless Control for a General Five-Phase BLDC Motor Incorporating System Delay and Phase Resistance.
IEEE Access
Vitenskapelig artikkel
-
Bana, Prabhat Ranjan;
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2023)
ANN-Based Surrogate PI and MPC Controllers for Grid-Connected VSC System: Small-Signal Analysis and Comparative Evaluation.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2013)
Mitigation of Asymmetrical Grid Faults in Induction Generator-Based Wind Turbines Using Constant Power Load.
Energies
Vitenskapelig artikkel
-
Torres Olguin, Raymundo E.;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2012)
Integration of Offshore Wind Farm using a Hybrid HVDC Transmission Composed by PWM Current-Source Converter and Line-Commutated Converter.
Asia-Pacific Power and Energy Engineering Conference
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
Coordinated control of series-connected offshore wind park based on matrix converters.
Wind Energy
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
A Study of Efficiency in a Reduced Matrix Converter for Offshore Wind Farms.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Lyu, Jing;
Cai, Xu;
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Sub-synchronous Oscillation Mechanism and Its Suppression in MMC-Based HVDC Connected Wind Farms.
IET Generation, Transmission & Distribution
Vitenskapelig artikkel
-
Molinas, Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2010)
Extending the Life of Gear Box in Wind Generators by Smoothing Transient Torque With STATCOM.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2016)
Discrete-time tool for stability analysis of DC power electronics-based cascaded systems.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
A fully differential capacitively-coupled high CMRR low-power chopper amplifier for EEG dry electrodes.
Analog Integrated Circuits and Signal Processing
Vitenskapelig artikkel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2013)
A Transformerless Series Reactive/Harmonic Compensator for Line-Commutated HVDC for Grid Integration of Offshore Wind Power.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
The Mode Mixing Problem and its Influence in the Neural Activity Reconstruction.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Apparent impedance analysis: A small-signal method for stability analysis of power electronic based systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Filippini, Mattia;
Molinas Cabrera, Maria Marta;
Oregi, Eneko Olea.
(2015)
A flexible power electronics configuration for coupling renewable energy sources.
Electronics (Basel)
Vitenskapelig artikkel
-
Chen, Zhang;
Cai, Xu;
Li, Zheng;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Properties and physical interpretation of the dynamic interactions between voltage source converters and grid: electrical oscillation and its stability control.
IET Power Electronics
Vitenskapelig artikkel
-
Chen, Zhang;
Cai, Xu;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Sequence Domain SISO Equivalent Models of a Grid-Tied Voltage Source Converter System for Small-Signal Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Chen, Zhang;
Cai, Xu.
(2017)
On the equivalence and impact on stability of impedance modeling of power electronic converters in different domains.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Alessandro, Boveri;
Silvestro, Federico;
Molinas Cabrera, Maria Marta;
Espen, Skjong.
(2019)
Optimal Sizing of Energy Storage Systems for Shipboard Applications.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Thams, Florian;
Erickson, Robert P.;
Molinas Cabrera, Maria Marta.
(2017)
Interaction of Droop Control Structures and its inherent effect on the power transfer limits in multi-terminal VSC-HVDC.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Villanueva, J.;
Lopez, Maximiliano Bueno;
Simón, J.;
Molinas Cabrera, Maria Marta;
Flores, J.;
Mendez, P.E..
(2020)
Application of Hilbert-Huang transform in the analysis of satellite-communication signals.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2020)
Harmonic-Domain SISO Equivalent Impedance Modeling and Stability Analysis of a Single-Phase Grid-Connected VSC.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Segura, María Victoria Gasca;
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2018)
Time-Frequency analysis for nonlinear and non-stationary signals using HHT: A mode mixing separation technique.
IEEE Latin America Transactions
Vitenskapelig artikkel
-
Astad, Kristian Prestrud;
Molinas Cabrera, Maria Marta.
(2010)
Direct AC/AC power converter for wind power application.
IEEE Mediterranean Electrotechnical Conference
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Subject Identification from Low-Density EEG-Recordings of Resting-States: A Study of Feature Extraction and Classification.
Lecture Notes in Networks and Systems
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Multi-objective optimization for EEG channel selection and accurate intruder detection in an EEG-based subject identification system.
Scientific Reports
Vitenskapelig artikkel
-
Sletta, Øystein Stavnes;
Cheema, Amandeep;
Marthinsen, Anne Joo Yun;
Andreassen, Ida Marie;
Sletten, Christian Moe;
Galtung, Ivar Tesdal;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2024)
Newly identified Phonocardiography frequency bands for psychological stress detection with Deep Wavelet Scattering Network.
Computers in Biology and Medicine
Vitenskapelig artikkel
-
Knai, Kathrine;
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Skjaervold, Nils Kristian.
(2017)
Instantaneous frequencies of continuous blood pressure
A comparison of the power spectrum, the continuous wavelet transform and the Hilbert-Huang transform.
Advances in Adaptive Data Analysis
Vitenskapelig artikkel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta;
Bolognani, S.
(2013)
Reactive Power Ancillary Service by Constant Power Loads in Distributed AC Systems.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rygg, Atle;
Cai, Xu.
(2019)
Impedance-based Analysis of Interconnected
Power Electronics Systems: Impedance
Network Modeling and Comparative Studies of
Stability Criteria.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Amin, Mohammad;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2017)
Self-synchronisation of Wind Farm in MMC-based HVDC System: A Stability Investigation.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Aljalal, Majid;
Molinas Cabrera, Maria Marta;
Aldosari, Saeed A.;
AlSharabi, Khalil;
Abdurraqeeb, Akram M.;
Alturki, Fahd A..
(2024)
Mild cognitive impairment detection with optimally selected EEG channels based on variational mode decomposition and supervised machine learning.
Biomedical Signal Processing and Control
Vitenskapelig artikkel
-
Ojo, Joseph Olorunfemi;
Tsorng-Juu, Peter Liang;
Doolla, Suryanarayana;
Harnefors, Lennart;
Yuen, Ron Hui Shu;
Kawakami, Noriko;
Jih-Sheng, Jason Lai;
Yen-Shin, Lai;
Liu, Yan-Fei;
Maksimovic, Dragan.
(2021)
A Mustard Seed Planted Years Ago Sprouts and Continues to Grow.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Leder
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
An, Quntao;
Bo, Zhou;
Wei, Jiadan.
(2021)
Freewheeling Current-Based Sensorless Field-Oriented Control of Five-Phase Permanent Magnet Synchronous Motors Under IGBT Failures of a Single Phase.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Chen, Zhang;
Isobe, Takanori;
Suul, Jon Are Wold;
Dragicevic, Tomislav;
Molinas Cabrera, Maria Marta.
(2021)
Parametric Stability Assessment of Single-Phase Grid-Tied VSCs Using Peak and Average DC Voltage Control.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Ruan, Hao;
Xiao, Yi;
Luo, Hao;
Yang, Yongheng;
Molinas Cabrera, Maria Marta;
Luo, Haoze.
(2025)
Optimized Parameter Design of Grid-Following and Grid-Forming Converters for Wide Operating Region.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Vatani, Mohsen;
Hovd, Morten;
Molinas Cabrera, Maria Marta.
(2013)
Finite Control Set Model Predictive Control of a Shunt Active Power Filter.
IEEE Applied Power Electronics Conference and Exposition (APEC)
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
Multi-objective Design of a Modular Power Converter Based on Medium Frequency AC-Link for Offshore DC Wind Park.
Energy Procedia
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Gutiérrez, Pablo Andrés Muñoz;
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2020)
Low-Density EEG for Neural Activity Reconstruction Using Multivariate Empirical Mode Decomposition.
Frontiers in Neuroscience
Vitenskapelig artikkel
-
Zong, Haoxiang;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2022)
Oscillation Propagation Analysis of Hybrid AC/DC Grids with High Penetration Renewables.
IEEE Transactions on Power Systems
Vitenskapelig artikkel
-
Sjolte, Jonas;
Bjerke, Ida Kathrine;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2013)
Summary of Performance After One Year of Operation with the Lifesaver Wave Energy Converter System.
Proceedings of the European Wave and Tidal Energy Conference (EWTEC)
Vitenskapelig artikkel
-
Liserre, Marco;
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Rodríguez, José F..
(2011)
Overview of Multi-MW Wind Turbines and Wind Parks.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Holtsmark, Nathalie;
Bahirat, Himanshu;
Molinas Cabrera, Maria Marta;
Mork, BA;
Høidalen, Hans Kristian.
(2013)
An All-DC Offshore Wind Farm With Series-Connected Turbines: An Alternative to the Classical Parallel AC Model?.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
Stability Analysis of Distributed Multi-Converter System.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Small-Signal Stability Assessment of Power Electronics based Power Systems: A Discussion of Impedance- and Eigenvalue-based Methods.
IEEE transactions on industry applications
Vitenskapelig artikkel
-
Bergna, Gilbert;
Berne, E;
Egrot, P;
Lefranc, P;
Arzande, A;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
An Energy-Based Controller for HVDC Modular Multilevel Converter in Decoupled Double Synchronous Reference Frame for Voltage Oscillation Reduction.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Cai, Xu;
Chen, Zhang.
(2016)
A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2014)
Self-sustained all-electric wave energy converter system.
Compel
Vitenskapelig artikkel
-
Wang, Yu;
Guan, Yuanpeng;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Chen, Si-Zhe;
Zhang, Yun.
(2021)
An Input-Voltage-Sharing Control Strategy of Input-Series Output-Parallel Isolated Bidirectional DC/DC Converter for DC Distribution Network.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2016)
Stability Analysis and Dynamic Performance Evaluation of a Power Electronics-Based DC Distribution System with Active Stabilizer.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Sang, Shun;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Zhang, Jianwen;
Rao, Fangquan.
(2019)
Control of a Type-IV Wind Turbine with the Capability of Robust Grid-Synchronization and Inertial Response for Weak Grid Stable Operation.
IEEE Access
Vitenskapelig artikkel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2014)
Asymmetrical fault ride through as ancillary service by constant power loads in grid-connected wind farm.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Zhang, Chen;
Føyen, Sjur;
Suul, Jon Are Wold;
Molinas, Marta Maria Cabrera.
(2020)
Modeling and Analysis of SOGI-PLL/FLL-based Synchronization Units: Stability Impacts of Different Frequency-feedback Paths.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Soler, Andres;
Moctezuma, Luis Alfredo;
Giraldo, Eduardo;
Molinas, Marta.
(2022)
Automated methodology for optimal selection of minimum electrode subsets for accurate EEG source estimation based on Genetic Algorithm optimization.
Scientific Reports
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2019)
Frequency-domain modelling and stability analysis of a DFIG-based wind energy conversion system under non-compensated AC grids: impedance modelling effects and consequences on stability.
IET Power Electronics
Vitenskapelig artikkel
-
Li, Jing;
Liu, Qiujiang;
Zhai, Yating;
Molinas Cabrera, Maria Marta;
Wu, Mingli.
(2020)
Analysis of Harmonic Resonance for Locomotive and Traction Network Interacted System Considering the Frequency-Domain Passivity Properties of the Digitally Controlled Converter.
Frontiers in Energy Research
Vitenskapelig artikkel
-
Zhang, Chen;
Li, Zheng;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2017)
Properties and Physical Interpretation of the Dynamic Interactions between Voltage Source Converters and Grid: Electrical Oscillation and Its Stability Control.
IET Power Electronics
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Cai, Xu.
(2017)
On the Equivalence and Impact on Stability of Impedance Modeling of Power Electronic Converters in Different Domains.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rygg, Atle;
Lyu, Jing;
Cai, Xu.
(2019)
Harmonic Transfer-function-based Impedance Modelling of a Three-phase VSC for Asymmetric AC Grids Stability Analysis.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Marthinsen, Anne Joo Yun;
Galtung, Ivar Tesdal;
Cheema, Amandeep;
Sletten, Christian Moe;
Andreassen, Ida Marie;
Sletta, Øystein Stavnes;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2023)
Psychological stress detection with optimally selected EEG channel using Machine Learning techniques.
CEUR Workshop Proceedings
Vitenskapelig artikkel
-
Sanabria-Villamizar, Mauricio;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta;
Bernal, Efrain.
(2019)
Hybrid Technique for the Analysis of Non-Linear and Non-Stationary Signals focused on Power Quality.
IEEE Xplore Digital Library
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Low Voltage Ride Through of Wind Farms With Cage Generators: STATCOM Versus SVC.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Urdahl, Paal Scheline;
Omsland, Vegard;
Løkken, Sandra Garder;
Dokken, Mari Hestetun;
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta.
(2024)
Impact of Ocular Artifact Removal on EEG-Based Color Classification for Locked-In Syndrome BCI Communication.
Communications in Computer and Information Science (CCIS)
Vitenskapelig artikkel
-
Vassbotn, Molly;
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta;
Nordstrøm-Hauge, Iselin Johanna.
(2024)
EEG-Based Alcohol Detection System for Driver Monitoring.
International Journal of Psychological Research
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Suzuki, Yoko;
Furuki, Junya;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2024)
GRU-powered sleep stage classification with permutation-based EEG channel selection.
Scientific Reports
Vitenskapelig artikkel
-
Acevedo, SS;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2012)
A Current-Coupled Topology for Grid Integration of Wind Turbines in Micro-Grids.
Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2017)
Sequence Domain SISO Equivalent Models of a Grid-tied Voltage Source Converter System for Small-Signal Stability Analysis.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Wiik, Jan Arild;
Kulka, Arkadiusz;
Isobe, Takanori;
Usuki, Kazuhiro;
Molinas Cabrera, Maria Marta;
Takaku, Taku;
Undeland, Tore Marvin;
Shimada, Ryuichi.
(2008)
Loss and Rating Considerations of a Wind Energy Conversion System with Reactive Compensation by Magnetic Energy Recovery Switch (MERS).
EPE Journal: European Power Electronics and Drives
Vitenskapelig artikkel
-
Lyu, Jing;
Zhang, Xin;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2018)
Harmonic State-Space Based Small-Signal Impedance Modeling of Modular Multilevel Converter with Consideration of Internal Harmonic Dynamics.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2016)
Frequency Domain Stability Analysis of MMC-Based HVdc for Wind Farm Integration.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Sjolte, Jonas;
Sandvik, Christian Mclisky;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2013)
Exploring the Potential for Increased Production from the Wave Energy Converter Lifesaver by Reactive Control.
Energies
Vitenskapelig artikkel
-
Liu, Jinhong;
Molinas Cabrera, Maria Marta.
(2021)
Impact of digital time delay on the stable grid-hosting capacity of large-scale centralised PV plant.
IET Renewable Power Generation
Vitenskapelig artikkel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
Impedance and Noise of Passive and Active Dry EEG Electrodes: A Review.
IEEE Sensors Journal
Vitenskapelig oversiktsartikkel
-
Skjong, Espen;
Rødskar, Egil;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Cunningham, Joseph.
(2015)
The Marine Vessel’s Electrical Power System: From its Birth to Present Day.
Proceedings of the IEEE
Vitenskapelig oversiktsartikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2014)
Degree of influence of system states transition on the stability of a DC microgrid.
IEEE Transactions on Smart Grid
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2015)
Large Signal Stability Analysis at the Common Coupling Point of a DC Microgrid: A Grid Impedance Estimation Approach based on a Recursive Method.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Suul, Jon Are Wold;
Molinas, Marta;
Undeland, Tore Marvin.
(2010)
STATCOM-Based Indirect Torque Control of Induction Machines During Voltage Recovery After Grid Faults.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Towards a minimal EEG channel array for a biometric system using resting-state and a genetic algorithm for channel selection.
Scientific Reports
Vitenskapelig artikkel
-
Cisneros, R;
Pirro, M;
Bergna Diaz, Gilbert;
Ortega, R.;
Ippoliti, G.;
Molinas Cabrera, Maria Marta.
(2015)
Global tracking passivity-based pi control of bilinear systems and its application to the boost and modular multilevel converters.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Rygg, Atle;
Skjong, Espen;
Molinas Cabrera, Maria Marta.
(2015)
Handling system harmonic propagation in a diesel-electric ship with an active filter.
Electrical Systems for Aircraft, Railway and Ship Propulsion
Vitenskapelig artikkel
-
Soler, Andres;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2023)
EEG source imaging of hand movement-related areas: An evaluation of the reconstruction accuracy with optimized channels.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
D'Arco, Salvatore;
Nilsen, Roy;
Amin, Mohammad.
(2025)
Single Coordinate Bode Plots for Stability Evaluation of MIMO Power Electronics Systems via a Frequency Coupling Corrective Factor.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Danielsen, Steinar;
Fosso, Olav B;
Molinas, Marta;
Suul, Jon Are Wold;
Toftevaag, Trond.
(2010)
Simplified models of a single-phase power electronic inverter for railway power system stability analysis—Development and evaluation.
Electric power systems research
Vitenskapelig artikkel
-
Liu, Jinhong;
Molinas Cabrera, Maria Marta.
(2020)
Impact of inverter digital time delay on the harmonic characteristics of grid-connected large-scale photovoltaic system.
IET Renewable Power Generation
Vitenskapelig artikkel
-
Liu, Jinhong;
Zhou, Lin;
Molinas Cabrera, Maria Marta.
(2018)
Damping region extension for digitally controlled LCL-type grid-connected inverter with capacitor-current feedback.
IET Power Electronics
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2015)
Comparative study of wind turbine power converters based on medium-frequency AC-link for offshore DC-grids.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Heidari, Ali.
(2020)
A Power Efficient Low-noise and High Swing CMOS Amplifier for Neural Recording Applications.
IEEE Engineering in Medicine and Biology Society. Conference Proceedings
Vitenskapelig artikkel
-
Skjong, Espen;
Volden, Rune;
Rødskar, Egil;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Cunningham, Joseph.
(2016)
Past, Present and Future Challenges of the Marine Vessel's Electrical Power System.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Agheb, Edris;
Holtsmark, Nathalie Marie-Anna;
Hoidalen, Hans Kristian;
Molinas Cabrera, Maria Marta.
(2016)
High frequency wind energy conversion system for offshore DC collection grid—Part I: Comparative loss evaluation.
Sustainable Energy, Grids and Networks
Vitenskapelig artikkel
-
Holtsmark, Nathalie Marie-Anna;
Agheb, Edris;
Molinas Cabrera, Maria Marta;
Hoidalen, Hans Kristian.
(2016)
High frequency wind energy conversion system for offshore DC collection grid — Part II: Efficiency improvements.
Sustainable Energy, Grids and Networks
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Sjolte, Jonas;
Molinas Cabrera, Maria Marta;
Santos, Maider.
(2013)
Stochastic Rating of Storage Systems in Isolated Networks withIncreasing Wave Energy Penetration.
Energies
Vitenskapelig artikkel
-
Munoz, Pablo;
Giraldo, Eduardo;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta.
(2019)
Automatic Selection of Frequency Bands for Electroencephalographic Source Localization.
International IEEE/EMBS Conference on Neural Engineering
Vitenskapelig artikkel
-
Garcia Rosa, Paula Bastos;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2021)
Switching sequences for non-predictive declutching control of wave energy converters.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Drange, Ole;
Furuki, Junya;
Abe, Takashi;
Molinas, Marta Maria Cabrera.
(2021)
Automatic Onset Detection of Rapid Eye Movements in REM Sleep EEG Data.
IFAC-PapersOnLine
Vitenskapelig artikkel
-
Andrés, Muñoz-Gutiérrez Pablo;
Eduardo, Giraldo;
Maximiliano, Bueno-Lopez;
Molinas Cabrera, Maria Marta.
(2018)
Localization of Active Brain Sources From EEG Signals Using Empirical Mode Decomposition: A Comparative Study.
Frontiers in Integrative Neuroscience
Vitenskapelig artikkel
-
Gao, Lei;
Lyu, Jing;
Zong, Xin;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2025)
Online Oscillatory Stability Assessment of Renewable Energy Integrated Systems Based on Data-Driven and Knowledge-Driven Method.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Ludvigsen, Sara Lund;
Buøen, Emma Horn;
Soler Guevara, Andres Felipe;
Molinas, Marta Maria Cabrera.
(2021)
Searching for Unique Neural Descriptors of Primary Colours in EEG Signals: A Classification Study.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
-
Tian, Bing;
Li, Yingzhen;
Hu, Jiasongyu;
Wang, Gaolin;
Molinas Cabrera, Maria Marta;
Zhang, Guoqiang;
Wang, Kai;
Zhang, Zhuoran.
(2024)
A wide speed range sensorless control for three-phase PMSMs based on a high-dynamic back-EMF observer.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Bergna-Diaz, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2019)
Optimal Shaping of the MMC Circulating Currents for Preventing AC-Side Power Oscillations from Propagating into HVdc Grids.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta;
Abe, Takashi.
(2025)
Unlocking Dreams and Dreamless Sleep: Machine Learning Classification With Optimal EEG Channels.
BioMed Research International
Vitenskapelig artikkel
-
Maldonado, Juvenal Villanueva;
Lopez, Maximiliano Bueno;
Rodriguez, Jorge Simon;
Molinas Cabrera, Maria Marta;
Troncoso, Jorge Flores;
Monroy, Paul Erick Mendez.
(2019)
Aplicación de la Transformada de Hilbert-Huang en el Análisis de Señales de Comunicación Satelital.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2020)
Modeling and analysis of grid-synchronizing stability of a Type-IV wind turbine under grid faults.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
-
Hernández-Ramírez, Julio;
Segundo-Ramírez, Juan;
Molinas Cabrera, Maria Marta.
(2024)
Comprehensive DQ impedance modeling of AC power-electronics-based power systems with frequency-dependent transmission lines.
Electric power systems research
Vitenskapelig artikkel
-
Molinas Cabrera, Maria Marta;
Næss, Bjarne Idsøe;
Gullvik, William;
Undeland, Tore Marvin.
(2006)
Robust Wind Turbine System Against Voltage Sag with Induction Generators Interfaced to the Grid by Power Electronic Converters.
IEEJ Transactions on Industry Applications
Vitenskapelig artikkel
-
Ma, Ke;
Liu, Jinjun;
Molinas Cabrera, Maria Marta.
(2024)
Guest Editorial: Special Issue on Design and Validation Methodologies for Power Electronics Components and Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig oversiktsartikkel
-
Monti, Antonello;
Molinas Cabrera, Maria Marta.
(2019)
A Ship Is a Microgrid and a Microgrid Is a Ship: Commonalities and Synergies.
IEEE Electrification Magazine
Leder
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2020)
An Integrated Method for Generating VSCs’ Periodical Steady-state Conditions and HSS-based Impedance Model.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Yang, Ling;
Huang, Zehang;
Chen, Jinghua;
Luo, Jianqiang;
Wang, Yu;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2023)
Stability Analysis and Interaction-Rule-Based Optimization of Multisource and Multiload DC Microgrid.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav Bjarte;
Molinas Cabrera, Maria Marta.
(2023)
Recursive Multi-Channel Prony for PMU.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Chang, Liuchen;
Mazumder, Sudip K.;
Molinas Cabrera, Maria Marta.
(2024)
Guest Editorial: Special Issue on Power Electronics for Distributed Energy Resources.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig oversiktsartikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Classification of low-density EEG for epileptic seizures by
energy and fractal features based on EMD.
Journal of Biomedical Research (JBR)
Vitenskapelig artikkel
-
Lopez, Maximiliano Bueno;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2019)
The mode mixing problem and its influence in the neural activity reconstruction.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2015)
Discrete-time Modelling, Stability Analysis, and Active Stabilization of DC Distribution Systems With Constant Power Loads.
IEEE Applied Power Electronics Conference and Exposition (APEC)
Vitenskapelig artikkel
-
Zhang, Yu;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2024)
Control of Virtual Synchronous Generator with Improved Transient Angle Stability under Symmetric and Asymmetric Short Circuit Fault.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Bialasiewicz, JT.
(2013)
Introduction to the Special Section on Control and Grid Integration of Wind Energy Systems-Part II.
IEEE transactions on industrial electronics (1982. Print)
Leder
-
Liserre, Marco;
Dobson, Roberto Cardenas;
Molinas Cabrera, Maria Marta;
Rodriguez, Jose M.
(2011)
Overview of Multi-MW wind turbines and wind parks.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Carraro, Matteo;
Molinas Cabrera, Maria Marta;
Mattavelli, Paolo.
(2011)
Effect of Control Strategies and Power Take-Off Efficiency on the Power Capture From Sea Waves.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Zhang, Chen;
Zong, Haoxiang;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2023)
On the Relation of Nodal Admittance- and Loop Gain-Model Based Frequency-Domain Modal Methods for Converters-Dominated Systems.
IEEE Transactions on Power Systems
Vitenskapelig artikkel
-
Zhang, Yu;
Zhang, Chen;
Yang, Renxing;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2023)
Current-Constrained Power-Angle Characterization Method for Transient Stability Analysis of Grid-Forming Voltage Source Converters.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Event-related potential from EEG for a two-step Identity Authentication System.
IEEE Conference on Industrial Informatics
Vitenskapelig artikkel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2013)
Power Collection from Wave Energy Farms.
Applied Sciences
Vitenskapelig artikkel
-
Abildgaard, Elisabeth Nøkleby;
Molinas Cabrera, Maria Marta.
(2012)
Modelling and Control of the Modular Multilevel Converter (MMC).
Energy Procedia
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2016)
Understanding the origin of oscillatory phenomena observed between wind farms and HVdc systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav Bjarte;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2024)
Power system instability prediction from the solution pattern of differential Riccati equations.
The Journal of Engineering
Vitenskapelig artikkel
-
Maximiliano, Bueno-López;
Andrés, Muñoz-Gutiérrez Pablo;
Eduardo, Giraldo;
Molinas Cabrera, Maria Marta.
(2019)
Electroencephalographic Source Localization based on Enhanced Empirical Mode Decomposition.
IAENG International Journal of Computer Science
Vitenskapelig artikkel
-
Xie, Xiarong;
Wang, Xiongfei;
Hu, Jiabing;
Xu, Lie;
Bongiorno, Massimo;
Miao, Zhixin;
Molinas Cabrera, Maria Marta;
Pota, Hemanshu;
Rodriguez, Pedro.
(2019)
Guest Editorial: Oscillations in Power Systems with High Penetration of Renewable Power Generations.
IET Renewable Power Generation
Leder
-
Skjong, Espen;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta.
(2019)
Distributed control architecture for real-time model predictive control for system-level harmonic mitigation in power systems.
ISA transactions
Vitenskapelig artikkel
-
See, Phen Chiak;
Su, Vin Cent;
Molinas Cabrera, Maria Marta.
(2012)
Ant colony optimization applied to control of ocean wave energy converters.
Energy Procedia
Vitenskapelig artikkel
-
Khodaparast, Jalal;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2022)
Phasor Estimation by EMD-Assisted Prony.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
See, Phen Chiak;
Fosso, Olav B;
Wong, Kuan Yew;
Molinas Cabrera, Maria Marta.
(2016)
Flow-Based Forward Capacity Mechanism: An Alternative to the regulated Capacity Remuneration Mechanisms in Electricity Market With High RES Penetration.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Torres Olguin, Raymundo E.;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2012)
Offshore Wind Farm Grid Integration by VSC Technology With LCC-Based HVDC Transmission.
IEEE Transactions on Sustainable Energy
Vitenskapelig artikkel
-
Tian, Bing;
Lu, Runze;
Wei, Jiadan;
Molinas Cabrera, Maria Marta;
Wang, Kai;
Zhang, Zhuoran.
(2023)
Neutral Voltage Modeling and Handling Approach for Five-Phase PMSMs Under Two-Phase Insulation Fault-Tolerant Control.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Ulvin, Johannes Christopher Bedos;
Molinas Cabrera, Maria Marta;
Sjolte, Jonas.
(2012)
Analysis of the Power Extraction Capability for the Wave Energy Converter BOLT (R).
Energy Procedia
Vitenskapelig artikkel
-
Guerrero, Josep;
Davoudi, Ali;
Belkhayat, Mohamed;
Benbouzid, Mohamed El Hachemi;
Corzine, Keith A.;
Cramer, Aaron M.;
Dougal, Roger A.;
Gamini, Shanta;
Khersonsky, Yuri;
Kouro, Samir.
(2017)
Guest editorial Energy conversion in next-generation electric ships.
IEEE transactions on energy conversion
Leder
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2019)
A Gray-Box Method for Stability and Controller Parameter Estimation in HVDC-Connected Wind Farms Based on Nonparametric Impedance.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rygg, Atle.
(2018)
On the Impedance Modeling and Equivalence of AC/DC Side Stability Analysis of a Grid-tied Type-IV Wind Turbine System.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Zheng, Li;
Cai, Xu.
(2020)
Synchronizing Stability Analysis and Region of Attraction Estimation of Grid-Feeding VSCs Using Sum-of-Squares Programming.
Frontiers in Energy Research
Vitenskapelig artikkel
-
Lopez, Maximiliano Bueno;
Sanabria-Villamizar, Mauricio;
Molinas Cabrera, Maria Marta;
Bernal-Alzate, Efrain.
(2020)
Oscillation analysis of low-voltage distribution systems with high penetration of photovoltaic generation.
Electrical engineering (Berlin. Print)
Vitenskapelig artikkel
-
Zong, Haoxiang;
Zhang, Chen;
Lyu, Jing;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Fangquan, Rao.
(2020)
Generalized MIMO Sequence Impedance Modeling and Stability Analysis of MMC-HVDC With Wind Farm Considering Frequency Couplings.
IEEE Access
Vitenskapelig artikkel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
EEG Channel-Selection Method for Epileptic-Seizure Classification Based on Multi-Objective Optimization.
Frontiers in Neuroscience
Vitenskapelig artikkel
-
Soler Guevara, Andres Felipe;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2019)
DYNLO: Enhancing Non-linear Regularized State Observer Brain Mapping Technique by Parameter Estimation with Extended Kalman Filter.
Lecture Notes in Computer Science (LNCS)
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Understanding the origin of oscillatory phenomena observed between wind farms and HVDC systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Cai, Xu.
(2017)
Impact of power flow direction on the stability of VSC-HVDC seen from the impedance nyquist plot.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Gavagsaz-Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2017)
Discrete-Time Tool for Stability Analysis of DC Power Electronics-Based Cascaded Systems.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Xiao, Donghua;
Hu, Haitao;
Chen, Siyi;
Song, Yitong;
Pan, Pengyu;
Molinas Cabrera, Maria Marta.
(2022)
Rapid dq-Frame Impedance Measurement for Three-Phase Grid Based on Interphase Current Injection and Fictitious Disturbance Excitation.
IEEE Transactions on Instrumentation and Measurement
Vitenskapelig artikkel
-
Tian, Bing;
Sun, Li;
Molinas Cabrera, Maria Marta;
An, Quntao.
(2020)
Repetitive control based phase voltage modulation amendment for FOC-based five-phase PMSMs under single-phase open fault.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Wu, Mingli;
Li, Jing;
Liu, Qiujiang;
Yang, Shaobing;
Molinas Cabrera, Maria Marta.
(2020)
Measurement of Impedance-Frequency Property of Traction Network Using Cascaded H-Bridge Converters: Device Design and On-Site Test.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Villanueva, J.;
Lopez, Maximiliano Bueno;
Molinas Cabrera, Maria Marta;
Flores, J;
Mendez, PE.
(2020)
Aplicación de la transformada de Hilbert-Huang en el análisis de señales de comunicación satelital.
Revista Iberoamericana de Automática e Informática industrial
Vitenskapelig artikkel
-
Tarasiuk, Tomasz;
Zunino, Yuri;
Lopez, Maximiliano Bueno;
Silvestro, Federico;
Pilatis, Andrzej;
Molinas Cabrera, Maria Marta.
(2020)
Frequency Fluctuations in Marine Microgrids: Origins and Identification Tools.
IEEE Electrification Magazine
Vitenskapelig artikkel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
An, Quntao.
(2020)
PWM investigation of a Field-oriented controlled Five-Phase PMSM under two-phase open faults.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Zong, Haoxiang;
Lyu, Jing;
Cai, Xu;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Accurate aggregated modelling of wind farm systems in modified sequence domain for stability analysis.
Electric power systems research
Vitenskapelig artikkel
-
Lopez, Maximiliano Bueno;
Rodriguez-Sanchez, Patricia;
Molinas Cabrera, Maria Marta.
(2019)
Sustainable model for rural electrification projects in Non-Interconnected Areas in Colombia.
IEEE Xplore Digital Library
Vitenskapelig artikkel
-
Nøland, Jonas Kristiansen;
Leandro, Matteo;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2020)
High-Power Machines and Starter-Generator Topologies for More Electric Aircraft: A Technology Outlook.
IEEE Access
Vitenskapelig artikkel
-
Serena, Alberto;
Molinas Cabrera, Maria Marta;
Cobo, I.
(2012)
Design of a Direct Drive Wave Energy Conversion System for the Seaquest Concept.
Energy Procedia
Vitenskapelig artikkel
-
Skjong, Espen;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta;
Sørensen, Asgeir Johan.
(2017)
Approaches to Economic Energy Management in Diesel-Electric Marine Vessels.
IEEE Transactions on Transportation Electrification
Vitenskapelig artikkel
-
Leng, Minrui;
Sahoo, Subham;
Blaabjerg, Frede;
Molinas Cabrera, Maria Marta.
(2022)
Projections of Cyberattacks on Stability of DC Microgrids - Modeling Principles and Solution.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Ohuchi, Kazuki;
Hirase, Yuko;
Molinas Cabrera, Maria Marta.
(2023)
MIMO and SISO Impedance-based Stability Assessment of a Distributed Power Source Dominated System.
IEEJ Journal of Industry Applications
Vitenskapelig artikkel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Cai, Xu.
(2016)
Impact of Power Flow Direction on the Stability of VSC-HVDC Seen from the Impedances Nyquist Plot.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Optimal LQG Controller for Variable Speed Wind Turbine Based on Genetic Algorithms.
Energy Procedia
Vitenskapelig artikkel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
A Simple Procedure to Evaluate the Efficiency and Power Density of Power Conversion Topologies for Offshore Wind Turbines.
Energy Procedia
Vitenskapelig artikkel
-
Bergna Diaz, Gilbert;
Garces Ruiz, Alejandro;
Berne, E;
Egrot, P;
Arzande, A;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2014)
A generalized power control approach in ABC frame for modular multilevel converter HVDC links based on mathematical optimization.
IEEE Transactions on Power Delivery
Vitenskapelig artikkel
-
Skjong, Espen;
Suul, Jon Are Wold;
Rygg, Atle;
Johansen, Tor Arne;
Molinas Cabrera, Maria Marta.
(2016)
System-Wide Harmonic Mitigation in a Diesel Electric Ship by Model Predictive Control.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Vatne, Åshild;
Molinas Cabrera, Maria Marta;
Foosnæs, Jan Andor.
(2012)
Analysis of a Scenario of Large Scale Adoption of Electrical Vehicles in Nord-Trondelag.
Energy Procedia
Vitenskapelig artikkel
-
Skjong, Espen;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2016)
Optimal Compensation of Harmonic Propagation in a Multi-Bus Microgrid.
The Renewable Energies and Power Quality Journal (RE&PQJ)
Vitenskapelig artikkel
-
Føyen, Sjur;
Shah, Chirag Ramgopal;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2024)
Synchronisation, dispatch and droop of VSCs: revisiting functionality in various coordinate systems.
IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG)
Vitenskapelig artikkel
-
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Lundheim, Lars Magne;
Larsen, Bjørn B..
(2016)
Towards a real-time measurement platform for microgrids in isolated communities.
Procedia Engineering
Vitenskapelig artikkel
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
Alturki, Fahd A..
(2024)
Correction to: Selecting EEG channels and features using multi-objective optimization for accurate MCI detection: validation using leave-one-subject-out strategy (Scientific Reports, (2024), 14, 1, (12483), 10.1038/s41598-024-63180-y).
Scientific Reports
Korrigendum
-
Torres Olguin, Raymundo E.;
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2013)
Integration of Offshore Wind Farm Using a Hybrid HVDC Transmission Composed by the PWM Current-Source Converter and Line-Commutated Converter.
IEEE transactions on energy conversion
Vitenskapelig artikkel
-
Wang, Yu;
Guan, Yuanpeng;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Hu, Wang;
Zhang, Yun.
(2022)
Open-Circuit Switching Fault Analysis and Tolerant Strategy for Dual-Active-Bridge DC-DC Converter Considering Parasitic Parameters.
IEEE transactions on power electronics
Vitenskapelig artikkel
-
Li, Jing;
Wei, Yingdong;
Li, Xiaoqian;
Lu, Chao;
Guo, Xu;
Lin, Yunzhi;
Molinas Cabrera, Maria Marta.
(2023)
Modeling and stability prediction for the static-power-converters interfaced flexible AC traction power supply system with power sharing scheme.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Cai, Xu.
(2017)
A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems.
IEEE Journal of Emerging and Selected Topics in Power Electronics
Vitenskapelig artikkel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta;
Rodríguez, Pedro.
(2012)
A generalized compensation theory for active filters based on mathematical optimization in ABC frame.
Electric power systems research
Vitenskapelig artikkel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta;
Degano, Marco;
Zanchetta, Pericle.
(2014)
Stability evaluation of a DC micro-grid and future interconnection to an AC system.
Renewable Energy
Vitenskapelig artikkel
-
Li, Jing;
Wu, Mingli;
Molinas Cabrera, Maria Marta;
Song, Kejian;
Liu, Qiujiang.
(2019)
Assessing High-Order Harmonic Resonance in Locomotive-Network Based on the Impedance Method.
IEEE Access
Vitenskapelig artikkel
-
Yang, Ling;
Luo, Jiahao;
Liao, Junhao;
Wen, Xutao;
Yuan, Chongyao;
Wang, Yu;
Luo, Dongtao;
Molinas Cabrera, Maria Marta;
Fosso, Olav Bjarte.
(2025)
A fast SOC balancing control strategy for distributed energy storage system based on sinusoidal signal injection.
International Journal of Electrical Power & Energy Systems
Vitenskapelig artikkel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Martin, Jean-Philippe;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Discrete-Time Modeling, Stability Analysis, and Active Stabilization of DC Distribution Systems with Multiple Constant Power Loads.
IEEE transactions on industry applications
Vitenskapelig artikkel
-
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2012)
Tunable Control Strategy for Wave Energy Converters With Limited Power Takeoff Rating.
IEEE transactions on industrial electronics (1982. Print)
Vitenskapelig artikkel
-
Cárdenas, Roberto;
Molinas Cabrera, Maria Marta;
Bialasiewicz, JT.
(2013)
Introduction to the Special Section on Control and Grid Integration of Wind Energy Systems-Part I.
IEEE transactions on industrial electronics (1982. Print)
Leder
-
See, Phen Chiak;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Wong, Kuan Yew.
(2019)
An Approach for Establishing a Common Grid Model for Flow-based Market Mechanism Simulations.
CSEE Journal of Power and Energy Systems (JPES)
Vitenskapelig artikkel
-
See, Phen Chiak;
Su, Vin Cent;
Molinas Cabrera, Maria Marta.
(2013)
A binary ACO for controlling all-electric power take off system in wave energy converters.
International Journal of Renewable Energy Technology
Vitenskapelig artikkel
-
Aljalal, Majid;
Aldosari, Saeed A.;
Molinas Cabrera, Maria Marta;
Alturki, Fahd A..
(2024)
Selecting EEG channels and features using multi-objective optimization for accurate MCI detection: validation using leave-one-subject-out strategy.
Scientific Reports
Vitenskapelig artikkel
Bøker
-
Molinas Cabrera, Maria Marta.
(2019)
2019 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Hillenbrand, Benedikt;
Molinas Cabrera, Maria Marta.
(2017)
Impact of time varying angular frequency on the separation of instantaneous power components in stand-alone power systems.
Proceedings of the 2017 6th International Conference on Clean Electrical Power (ICCEP 2017), Institute of Electrical and Electronics Engineers ( IEEE )
Antologi
-
Singh, Rajiv;
Padmanaban, Sanjeevikumar;
Dwivedi, Sanjeet;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede.
(2021)
Cable Based and Wireless Charging Systems for Electric Vehicles:
Technology and control, management and grid integration.
Institution of Engineering and Technology (IET)
Lærebok
-
Molinas Cabrera, Maria Marta.
(2022)
Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022 - ECCE Asia).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta;
Soloot, Amir Hayati.
(2016)
STABILITY INFLUENCE OF RENEWABLE ENERGY SYSTEMS: CONNECTION TO DC NANOGRIDS.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Singh, Rajiv;
Sanjeevikumar, Padmanaban;
Kumar, Dwivedi Sanjeet;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede.
(2021)
Cable Based and Wireless Charging Systems for Electric Vehicles: Technology and control, management and grid integration.
Institution of Engineering and Technology (IET)
Oppslagsverk
-
Molinas Cabrera, Maria Marta.
(2018)
Brain Informatics. BI 2018. Lecture Notes in Computer Science.
Springer Publishing Company
Antologi
-
Molinas Cabrera, Maria Marta.
(2018)
IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Molinas Cabrera, Maria Marta.
(2018)
2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Molinas Cabrera, Maria Marta.
(2018)
2018 IEEE Global Humanitarian Technology Conference (GHTC).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Molinas Cabrera, Maria Marta.
(2019)
19th International Conference on Bioinformatics and Bioengineering.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2019)
2019 15th Conference on Ph.D Research in Microelectronics and Electronics (PRIME).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Kulia, Geir.
(2017)
Understanding Instantaneous frequency detection: A discussion of Hilbert-Huang Transform versus Wavelet Transform.
University of Granada
Antologi
-
Lyu, Jing;
Molinas Cabrera, Maria Marta;
Cai, Xu.
(2017)
Stabilization control methods for enhancing the stability of wind farm integration via an MMC-based HVDC system.
Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2017), Institute of Electrical and Electronics Engineers
Antologi
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2019)
Non-filter position sensorless control based on a α-β frame complex PI controller.
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig.
(2020)
2020 IEEE International Conference on Industrial Technology (ICIT).
IEEE (Institute of Electrical and Electronics Engineers)
Antologi
-
Molinas Cabrera, Maria Marta.
(2016)
Offshore wind farms, Technologies, Design and Operation.
Woodhead Publishing Limited
Faglig monografi
Del av bok/rapport
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Effects and Mitigation of Post-Fault Commutation Failures in Line-Commutated HVDC Transmission System.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Barrera-Cardenas, Rene Alexander.
(2016)
Modelling of power electronics components for evaluation of efficiency, power density and power-to-mass ratio of offshore wind power converters.
Faglig kapittel
-
Skjong, Espen;
Gale, Serge;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2016)
Data-Driven decision support tool for power quality measures in marine vessel power system.
Vitenskapelig kapittel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Lyu, Jing.
(2015)
Oscillatory phenomena between wind farms and HVDC systems: The impact of control.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2013)
Matrix converter modulation for series-connected wind turbines with high frequency link.
Vitenskapelig kapittel
-
Li, Chendan;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Yue, Jingpeng;
Raboni, Pietro.
(2020)
Defining Three Distribution System Scenarios for Microgrid Applications.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2013)
Grid integration: part I - Power system interactions of wave energy generators.
Vitenskapelig kapittel
-
Nøland, Jonas Kristiansen;
Molinas Cabrera, Maria Marta.
(2020)
Rotating Power Electronics for Electrical Machines and Drives - Design Considerations and Examples.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta;
Ringwood, John V..
(2013)
Control systems - design and implementation.
Vitenskapelig kapittel
-
Torres-Garcia, Alejandro Antonio;
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2020)
Assessing the impact of idle state type on the identification of RGB color exposure for BCI.
Vitenskapelig kapittel
-
Pettersen, Martine Furnes;
Fosso, Olav B;
Garcia Rosa, Paula Bastos;
Molinas Cabrera, Maria Marta.
(2020)
Effect of non-ideal power take-off on the electric output power of a wave energy converter under suboptimal control.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2013)
Thermal analysis of matrix and Back-To-Back converters for series-connected wind turbines.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
High Frequency Wind Energy Conversion from the Ocean.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Converter Connected in Array with Common DC-Link for Improved Power Quality.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Converter Array with Energy Storage and Reactive Power Compensation for Improved Power Quality.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Bjerke, Ida Kathrine;
Crozier, Aina;
Tjensvoll, Gaute;
Molinas Cabrera, Maria Marta.
(2012)
All-Electric Wave Energy Power Take Off System with Improved Power Quality at the Grid Connection Point.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Impact of Operation Principle on the Losses of a Reduced Matrix Converter for Offshore Wind Parks.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Tedeschi, Elisabetta;
Verez, Guillaume;
Molinas, Marta.
(2010)
Power Collection Array for Improved Wave Farm Output based on Reduced Matrix Converters.
Vitenskapelig kapittel
-
Zeiner, Ingerid;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2014)
Competitiveness of Grid Connected Photovoltaic Power Supply for a Desalination Plant under a Prospective Power Market in Paraguay.
Vitenskapelig kapittel
-
Gasca, Maria Victoria;
Garces, Alejandro;
Molinas Cabrera, Maria Marta.
(2019)
Stability Analysis of the Proportional-Resonant Controller in Single Phase Converters.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas Cabrera, Maria Marta.
(2011)
A flexible and optimal power theory for reactive power compensation in ABC frame.
Vitenskapelig kapittel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2019)
Non-filter position sensorless control based on a α-β frame complex PI controller.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Comparison of Wind Energy Conversion Systems based on High frequency AC-Link: Three-phase Vs. Single-phase.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Assessment of a stability analysis tool for constant power loads in dc-grids.
Vitenskapelig kapittel
-
Kulia, Geir;
Molinas Cabrera, Maria Marta;
Lundheim, Lars Magne;
Fosso, Olav B.
(2017)
Simple model for understanding harmonics propagation in single-phase microgrids.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Comparative Investigation of Losses in a Reduced Matrix Converter for Off-Shore Wind Turbines.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Molinas Cabrera, Maria Marta;
Tjensvoll, Gaute;
Sørby, Bernt.
(2012)
Annual Energy and Power Quality from an All-Electric Wave Energy Converter Array.
Vitenskapelig kapittel
-
Danielsen, Steinar;
Molinas Cabrera, Maria Marta;
Assefa, Hana Yohannes.
(2009)
Impact of PWM Switching on Modeling of Low Frequency Power Oscillation in Electrical Rail Vehicle.
Vitenskapelig kapittel
-
Bernal, Efrain;
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta.
(2017)
Decentralized Fuzzy-Based Voltage Control for LV Distribution Systems.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold.
(2020)
Stability Analysis of a Virtual Synchronous
Machine-based HVDC Link by Gear's Method.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Amin, Mohammad;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2014)
Small-Signal Stability Study of the Cigré DC Grid Test System with Analysis of Participation Factors and Parameter Sensitivity of Oscillatory Modes.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Skjervheim, Ottar;
Andreassen, Pål;
Undeland, Tore Marvin;
Hals, Jørgen;
Moan, Torgeir;
Sørby, Bernt.
(2007)
Power Electronics as Grid Interface for Actively Controlled Wave Energy Converters.
Vitenskapelig kapittel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Lyu, Jing;
Zong, Haoxiang;
Cai, Xu.
(2019)
Understanding the Nonlinear Behaviour and Synchronizing Stability of a Grid-Tied VSC Under Grid Voltage Sags.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2007)
A Simple Method for Analytical Evaluation of LVRT in Wind Energy for Induction Generators with STATCOM or SVC.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
A Current-Coupled Topology for Grid Integration of Wind Turbines in Micro-Grids.
Vitenskapelig kapittel
-
Zong, Haoxiang;
Lyu, Jing;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Mimo impedance based stability analysis of DFIG-based wind farm with MMC-HVDC in modifed sequence domain.
Vitenskapelig kapittel
-
Broen, Anders Kjeka;
Amin, Mohammad;
Skjong, Espen;
Molinas Cabrera, Maria Marta.
(2016)
Instantaneous frequency tracking of harmonic distortions for grid impedance identification based on Kalman filtering.
Vitenskapelig kapittel
-
D'Arco, Salvatore;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2014)
Implementation and Analysis of a Control Scheme for Damping of Oscillations in VSC-based HVDC Grids.
Vitenskapelig kapittel
-
Bergna-Diaz, Gilbert;
Suul, Jon Are Wold;
Berne, E;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2014)
MMC circulating current reference calculation in ABC frame by means of Lagrange Multipliers for ensuring constant DC power under unbalanced grid conditions.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2007)
Improved Grid Interface of Induction Generators for Renewable Energy by use of STATCOM.
Vitenskapelig kapittel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Heidari, Ali.
(2020)
A Fully Tunable Low-power Low-noise and High Swing EMG Amplifier with 8.26 PEF.
Vitenskapelig kapittel
-
Zong, Haoxiang;
Lyu, Jing;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta;
Rao, Fangquan.
(2019)
Modified sequence domain impedance modelling of the modular multilevel converter.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Carraro, Matteo;
Mattavelli, Paolo;
Molinas, Marta.
(2010)
Analysis of Power Extraction from Irregular Waves by All-Electric Power Take Off.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2011)
Matrix Converter Efficiency in a High Frequency Link Offshore WECS.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2011)
Power Electronics Modeling Fidelity: Impact on Stability Estimate of Micro-grid Systems.
Vitenskapelig kapittel
-
Bueno-Lopez, Maximiliano;
Muñoz-Gutiérrez, Pablo A.;
Eduardo, Giraldo;
Molinas Cabrera, Maria Marta.
(2018)
Analysis of Epileptic Activity Based on Brain Mapping of EEG Adaptive Time-Frequency Decomposition.
Vitenskapelig kapittel
-
Amin, Mohammad;
Zhang, Chen;
Rygg, Atle;
Unamuno, Eneko;
Molinas Cabrera, Maria Marta;
Belkhayat, Mohamed.
(1999)
Nyquist Stability Criterion and its Application to Power Electronic Systems.
Kapittel i oppslagsverk
-
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Isobe, Takanori.
(2020)
Single-phase synchronisation with Hilbert
transformers: a linear and frequency independent
orthogonal system generator.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Efficient Phasor Estimation under Steady State and
Dynamic Conditions.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
A Controllable Distributed Energy Resource with Active Filtering Capability Based on Online Harmonic Detection.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Parseh, Reza;
Molinas Cabrera, Maria Marta;
Kansanen, Kimmo.
(2013)
Bifurcation in PWM Converter-based Systems with Wireless Communication-based Current Controller.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2006)
Wind Farms with Increased Transient Stability Margin Provided by a STATCOM.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2014)
A Discrete-Time Tool to Analyze the Stability of Weakly Filtered Active Front-End PWM Converters.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta;
Tenti, Paulo.
(2011)
Application of Conservative Power Theory for Active Power Filtering og Line-Commutated HVDC for Offshore Wind Power.
Vitenskapelig kapittel
-
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Isobe, Takanori.
(2022)
Impedance scanning with chirps for single-phase converters.
Vitenskapelig kapittel
-
Zong, Haoxiang;
Zhang, Chen;
Cai, Xu;
Molinas Cabrera, Maria Marta.
(2022)
Analysis of Power Electronics-Dominated Hybrid
AC/DC Grid for Data-Driven Oscillation Diagnosis.
Vitenskapelig kapittel
-
Zhang, Yu;
Føyen, Sjur;
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Cai, Xu.
(2022)
Instability Mode Recognition of Grid-Tied Voltage Source Converters with Nonstationary Signal Analysis.
Vitenskapelig kapittel
-
Ohuchi, Kazuki;
Hirase, Yuko;
Molinas Cabrera, Maria Marta.
(2022)
Impedance-Based Stability Analysis of Systems with
the Dominant Presence of Distributed Power Sources.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2013)
Seamless Control of Distributed Multi-Converter System with High Power Quality.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Molinas Cabrera, Maria Marta.
(2013)
Stability Assessment of Distributed MultiConverter Systems in Automated Grid.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Martin, Jean-Philippe;
Molinas Cabrera, Maria Marta.
(2014)
A New Discrete-Time Modelling of PWM Converters for Stability Analysis of DC Microgrid.
Vitenskapelig kapittel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2016)
Self-synchronisation of wind farm in MMC-based HVDC system.
Vitenskapelig kapittel
-
Torres Olguin, Raymundo E.;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2011)
A direct power control for Hybrid HVDC transmission systems.
Vitenskapelig kapittel
-
Isobe, Takanori;
Zhang, Long;
Tadano, Hiroshi;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2016)
Control of DC-capacitor peak voltage in reduced capacitance single-phase STATCOM.
Vitenskapelig kapittel
-
Rygg, Atle;
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Gustavsen, Bjørn Alfred.
(2016)
Apparent impedance analysis: A new method for power system stability analysis.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Norum, Lars Einar;
Undeland, Tore Marvin.
(2008)
Tuning of Control Loops for Grid Connected Voltage Source Converters.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Phasor Estimation based on Modified Recursive Prony.
Vitenskapelig kapittel
-
Soler Guevara, Andres Felipe;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2020)
Low-Density EEG for Source Activity Reconstruction using Partial Brain Models.
Vitenskapelig kapittel
-
Sahoo, Subham;
Rana, Rubi;
Molinas Cabrera, Maria Marta;
Blaabjerg, Frede;
Dragicevic, Tomislav;
Mishra, Sukumar.
(2020)
A Linear Regression Based Resilient Optimal Operation of AC Microgrids.
Vitenskapelig kapittel
-
Nøland, Jonas Kristiansen;
Leandro, Matteo;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Nilssen, Robert.
(2019)
Electrical Machines and Power Electronics for Starter-Generators in More Electric Aircrafts: A Technology Review.
Vitenskapelig kapittel
-
Unamuno, Eneko;
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Barrena, Jon Andoni.
(2019)
Comparative Eigenvalue Analysis of Synchronous
Machine Emulations and Synchronous Machines.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Egrot, Philippe;
Lefranc, Pierre;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2012)
Mitigating DC-side power oscillations and negative sequence load currents in Modular Multilevel Converters under unbalanced faults - first approach using resonant PI.
Vitenskapelig kapittel
-
Skjong, Espen;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2015)
Optimized current reference generation for system-level harmonic mitigation in a diesel-electric ship using non-linear model predictive control.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2010)
Impact of control strategies on the rating of electric poewer take off for wave energy conversion.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2010)
Control Strategies of Wave Energy Converters Optimized under Power Electronics Rating Constraints.
Vitenskapelig kapittel
-
Amin, Mohammad;
Zhang, Chen;
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Unamuno, Eneko;
Belkhayat, Mohamed.
(2019)
Nyquist Stability Criterion and its Application to Power Electronics Systems.
Kapittel i oppslagsverk
-
Shah, Chirag Ramgopal;
Føyen, Sjur;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2024)
Influence of controller and reference frame on impedance coupling strength, its quantification and application to stability studies.
Vitenskapelig kapittel
-
Shad, Erwin;
Molinas, Marta;
Ytterdal, Trond.
(2020)
A Low-power and Low-noise Multi-purpose Chopper Amplifier with High CMRR and PSRR.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Molinas, Marta.
(2010)
Reduced Matrix Converter Operated as Current Source for Off-Shore Wind Farms.
Vitenskapelig kapittel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2024)
Impedance Reshaping of GFM Converters with Selective Resistive Behaviour for Small-signal Stability Enhancement.
Vitenskapelig kapittel
-
Naderi, Kebria;
Shad, Erwin Habibzadeh Tonekabony;
Molinas, Marta Maria Cabrera;
Heidari, Ali;
Ytterdal, Trond.
(2020)
A Very Low SEF Neural Amplifier by Utilizing a High Swing Current-Reuse Amplifier.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Speed regulation of a wind turbine with current source or matrix converter: Tuning procedure.
Vitenskapelig kapittel
-
Fløtaker, Simen Piene;
Soler, Andres;
Molinas Cabrera, Maria Marta.
(2023)
Primary color decoding using deep learning on source reconstructed EEG signal responses.
Vitenskapelig kapittel
-
Unamuno, Eneko;
Rygg, Atle;
Amin, Mohammad;
Molinas Cabrera, Maria Marta;
Barrena, Jon Andoni.
(2018)
Impedance-Based Stability Evaluation of Virtual Synchronous Machine Implementations in Converter Controllers.
Vitenskapelig kapittel
-
Danielsen, Steinar;
Molinas Cabrera, Maria Marta;
Toftevaag, Trond;
Fosso, Olav B.
(2009)
Constant power load charecteristic's influence on the low-frequency interaction between advanced electrical rail vehicle and railway traction power supply with rotary converters.
Vitenskapelig kapittel
-
Roaldsnes, Kristian Eggereide;
Gjengedal, Ørjan;
Molinas Cabrera, Maria Marta.
(2018)
Exploring the Attributes of Particle Filter vs Nonlinear Kalman Filter for Battery State of Charge Estimation.
Vitenskapelig kapittel
-
Gallegos, Noe Barrera;
Gasca Segura, Maria Victoria;
Molinas Cabrera, Maria Marta.
(2018)
Synchronization properties of Voltage Source Converters when seen as Coupled Oscillators based on the Kuramoto Model.
Vitenskapelig kapittel
-
Aabrek, Vegar;
Forseth, Ingvild;
Maximiliano, Bueno-Lopez;
Molinas Cabrera, Maria Marta.
(2018)
Design and Implementation of a Monitoring System for Decision Support in a Micro-Business Based on Solar Energy Microgrid in Rural Colombia.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Kondoh, Junji.
(2009)
Power Electronic Loads as Providers of Reactive Power Ancillary Service to the Grid: Analytical and Experimental study.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Pierfederici, Serge;
Nahid-Mobarakeh, Babak;
Molinas Cabrera, Maria Marta.
(2015)
Dynamic analysis of an on-board DC distribution
system with active stabilizer.
Vitenskapelig kapittel
-
Shah, Chirag Ramgopal;
Molinas Cabrera, Maria Marta;
Nilsen, Roy;
Amin, Mohammad.
(2023)
Limitations in Impedance Reshaping of Grid Forming Converters for Instability Prevention.
Vitenskapelig kapittel
-
Tedeschi, Elisabetta;
Molinas, Marta.
(2011)
Wave-to-Wave Buoys Control for Improved Power Extraction under Electro-Mechanical Constraints.
Vitenskapelig kapittel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta;
Cai, Xu;
Chen, Zhang.
(2016)
Frequency-dependent source and load impedances in power systems based on power electronic converters.
Vitenskapelig kapittel
-
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2016)
Real-time stability analysis of power electronic systems.
Vitenskapelig kapittel
-
Chicco, Gianfranco;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin;
Viglietti, Giovanni.
(2006)
Improvement of the Transient Stability Margin in Wind Systems with a STATCOM.
Vitenskapelig kapittel
-
Torres-García, Alejandro A.;
Mendoza-Montoya, Omar;
Molinas Cabrera, Maria Marta;
Antelisc, Javier M.;
Moctezuma, Luis Alfredo;
Hernández-Del-Toro, Tonatiuh.
(2021)
Pre-processing and Feature Extraction.
Faglig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2021)
EEG-based subject identification with multi-class classification.
Faglig kapittel
-
Thams, Florian;
Suul, Jon Are Wold;
D'Arco, Salvatore;
Molinas Cabrera, Maria Marta;
Fuchs, Friedrich W.
(2015)
Stability of DC voltage droop controllers in VSC HVDC systems.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta.
(2012)
Properties of reactive current injection by AC power electronic systems for loss minimization.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2021)
A Two-stage Area-efficient High Input Impedance CMOS Amplifier for Neural Signals.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2011)
Loss Minimization in AC Distribution System with High Share of Power Electronic Loads Providing Ancillary Reactive Power.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Moeinfard, Tania;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2021)
A Low-power High-gain Inverter Stacking Amplifier with Rail-to-Rail Output.
Vitenskapelig kapittel
-
Garcia Rosa, Paula Bastos;
Brodtkorb, Astrid H.;
Sørensen, Asgeir Johan;
Molinas Cabrera, Maria Marta.
(2019)
Evaluation of wave-frequency motions extraction from dynamic positioning measurements using the empirical mode decomposition.
Vitenskapelig kapittel
-
Zhang, Chen;
Molinas Cabrera, Maria Marta;
Føyen, Sjur;
Suul, Jon Are Wold;
Isobe, Takanori.
(2022)
Impedance Modeling and Comparative Analysis of
a Single-phase Grid-tied VSC Under Average and
Peak dc Voltage Controls.
Vitenskapelig kapittel
-
Soler Guevara, Andres Felipe;
Molinas Cabrera, Maria Marta;
Giraldo, Eduardo.
(2019)
Partial Brain Model For real-time classification of RGB visual stimuli: A brain mapping approach to BCI.
Vitenskapelig kapittel
-
Mogstad, Anne Berit;
Molinas Cabrera, Maria Marta;
Olsen, Pål Keim;
Nilssen, Robert.
(2008)
A Power Conversion System for Offshore Wind Parks.
Vitenskapelig kapittel
-
Skjong, Espen;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne;
Volden, Rune.
(2015)
Shaping the current waveform of an active filter for optimized system level harmonic conditioning.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Comparative study of semiconductor devices based on a meta-parameterised approach: SiC MOSFET vs Si IGBT technologies.
Vitenskapelig kapittel
-
Amin, Mohammad;
Rygg, Atle;
Molinas Cabrera, Maria Marta.
(2016)
Active power flow direction effect on stability in multi-terminal VSC-HVDC transmission system in integrating wind farm.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2011)
Stability Investigation of Control System for Power Electronic Converter Acting as Load Interface in AC Distribution System.
Vitenskapelig kapittel
-
Jing, Lyu;
Cai, Xu;
Xing, Zhang;
Molinas Cabrera, Maria Marta.
(2018)
Harmonic State Space Modeling and Analysis of Modular Multilevel Converter.
Vitenskapelig kapittel
-
Bergna Diaz, Gilbert;
Sanchez Acevedo, Santiago;
Berne, E;
Egrot, Phillipe;
Vannier, J.C;
Molinas Cabrera, Maria Marta.
(2014)
Frequency Scanning of Power Electronic-based Smart Grids: The Modular Multilevel Converter Application.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2011)
Reactive Power Compensation Capability of a Matrix Converter-based FACTS Device.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Naderi, Kebria;
Molinas Cabrera, Maria Marta.
(2020)
High Input Impedance Capacitively-coupled Neural Amplifier and Its Boosting Principle.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2019)
Modified Current-reuse OTA to Achieve High CMRR by utilizing Cross-coupled Load.
Vitenskapelig kapittel
-
Lyu, Jing;
Xu, Cai;
Molinas Cabrera, Maria Marta;
Zhang, Chen;
Renxing, Yang;
Fangquan, Rao.
(2018)
Analysis of Bifurcation Behaviors in MMC Connected to a Weak Grid.
Vitenskapelig kapittel
-
Gjengedal, Ørjan;
Vie, Preben Joakim Svela;
Molinas, Marta.
(2017)
Battery modeling and Kalman filter-based State-of-Charge estimation for a race car application.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Berne, E;
Garces Ruiz, Alejandro;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
A generalized power control approach in ABC frame for modular multilevel converters based on Lagrange multipliers.
Vitenskapelig kapittel
-
Boninella, Marco;
Solheim, Linn;
Molinas Cabrera, Maria Marta.
(2013)
Hybrid micro grid feasibility study for the Wawashang Complex in Nicaragua.
Vitenskapelig kapittel
-
Sagosen, Øystein;
Molinas Cabrera, Maria Marta.
(2013)
Large scale regional adoption of electric vehicles in Norway and the potential for using wind power as source.
Vitenskapelig kapittel
-
See, Phen Chiak;
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Foosnæs, Jan Andor.
(2013)
A method for optimizing the offer price of collaborative power generators.
Vitenskapelig kapittel
-
Allard, Stephane;
See, Phen Chiak;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Foosnæs, Jan Andor.
(2013)
Electric Vehicles Charging in a Smart Microgrid Supplied with Wind Energy.
Vitenskapelig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2018)
Towards an API for EEG-Based Imagined Speech classification.
Vitenskapelig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2018)
EEG-based Subjects Identification based on Biometrics of Imagined Speech using EMD.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
A comparison of WECS based on medium frequency AC-link for offshore DC Wind Park.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Ride-Through Enhancement of Line-Commutated HVDC Link for Large Offshore Wind Parks.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Skjervheim, Ottar;
Sørby, Bernt;
Andreassen, Pål;
Lundberg, S.;
Undeland, Tore Marvin.
(2007)
Power Smoothing by Aggregation of Wave Energy Converters for Minimizing Electrical Energy Storage Requirements.
Vitenskapelig kapittel
-
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
EMD Mode Mixing Separation of Signals with
Close Spectral Proximity in Smart Grids.
Vitenskapelig kapittel
-
Torres-Garcia, Alejandro Antonio;
Molinas Cabrera, Maria Marta.
(2019)
Analyzing the Recognition of Color Exposure and Imagined Color from EEG Signals.
Vitenskapelig kapittel
-
Nielsen, Knut Erik;
Molinas, Marta.
(2010)
Superconducting magnetic energy storage (SMES) in power systems with renewable energy sources.
Vitenskapelig kapittel
-
Hanssen, Mari Røed;
Molinas, Marta;
Garces Ruiz, Alejandro.
(2010)
Operation features of a reduced matrix converter for offshore wind power.
Vitenskapelig kapittel
-
Astad, Kristian Prestrud;
Molinas, Marta.
(2010)
Double input AC/AC nine-switch converter for multiple-generator drivetrain configuration in wind turbines.
Vitenskapelig kapittel
-
Garces Ruiz, Alejandro;
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2013)
Optimal control for an HVDC system with series connected offshore wind turbines.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Parseh, Reza;
Molinas Cabrera, Maria Marta;
Kansanen, Kimmo.
(2013)
Modeling and Simulation of Wireless Communication Based Robust Controller for Multi-Converter Systems.
Vitenskapelig kapittel
-
Astad, Kristian Prestrud;
Molinas, Marta.
(2010)
Direct AC/DC Power Converter for Wind Power Application.
Vitenskapelig kapittel
-
Corigliano, Silvia;
Mocecchi, Matteo;
Mirbagheri, Mina;
Merlo, Marco;
Molinas Cabrera, Maria Marta.
(2019)
Microgrid design: sensitivity on models and parameters.
Vitenskapelig kapittel
-
Moctezuma, Luis Alfredo;
Molinas Cabrera, Maria Marta.
(2019)
Sex differences observed in a study of EEG of linguistic activity and resting-state: Exploring optimal EEG channel configurations.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2012)
Transformer-less Series Voltage Injection for Reactive Power Compensation of Line-Commutated HVDC.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas, Marta.
(2010)
Reactive power compensation using an indirectly space vector-modulated matrix converter.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas, Marta.
(2010)
Optimal use of power electronic interfaces for loads in distributed systems.
Vitenskapelig kapittel
-
Bueno-Lopez, Maximiliano;
Giraldo, Eduardo;
Molinas Cabrera, Maria Marta.
(2017)
Analysis of Neural Activity from EEG Data based on EMD frequency bands.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Saublet, Louis-Marie;
Ghoachani, Roghayeh;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Energy management and stabilization of a hybrid DC microgrid for transportation applications.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Ghoachani, Roghayeh;
Nahid-Mobarakeh, Babak;
Pierfederici, Serge;
Molinas Cabrera, Maria Marta.
(2016)
Stability analysis of hybrid AC/DC power systems for more electric aircraft.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas, Marta.
(2010)
A series injection strategy for reactive power compensation of line commutated HVDC for offshore wind power.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas Cabrera, Maria Marta.
(2009)
Improvement in Reactive Power Consumption of Line Commutated HVDC Converters for Integration of Offshore Wind-Power.
Vitenskapelig kapittel
-
Jafar, Muhammad;
Molinas, Marta.
(2010)
Forced commutation through series voltage injection for reactive power reduction of line commutated HVDC converter terminal.
Vitenskapelig kapittel
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2015)
Impedance based stability analysis of VSC-based HVDC system.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Kondoh, Junji.
(2009)
Power Electronic Loads as Providers of Reactive Power Ancillary Service to the Grid: Analytical and Experimental Study.
Vitenskapelig kapittel
-
Fosso, Olav B;
Molinas Cabrera, Maria Marta;
Sand, Kjell;
Coldevin, Grete Håkonsen.
(2014)
Moving towards the Smart Grid: The Norwegian Case.
Vitenskapelig kapittel
-
Bueno-Lopez, Maximiliano;
Molinas Cabrera, Maria Marta;
Kulia, Geir.
(2017)
Proceedings of the International Work-Conference on Time Series Analysis.
Vitenskapelig kapittel
-
Åsly, Sara Hegdahl;
Moctezuma, Luis Alfredo;
Gilde, Monika;
Molinas Cabrera, Maria Marta.
(2019)
Towards EEG-based signals classification of RGB color-based stimuli.
Faglig kapittel
-
Wiik, Jan Arild;
Kulka, Arkadiusz;
Isobe, Takanori;
Usuki, Kazuhiro;
Molinas Cabrera, Maria Marta;
Takaku, Taku;
Undeland, Tore Marvin;
Shimada, Ryuichi.
(2008)
Control Design and Experimental Verification of a Series Compensated 50 kW Permanent Magnet Wind Power Generator.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Meta-parameterisation of power semiconductor devices for studies of efficiency and power density in high power converters.
Vitenskapelig kapittel
-
Skjong, Espen;
Ochoa-Gimenez, Miguel;
Molinas Cabrera, Maria Marta;
Johansen, Tor Arne.
(2015)
Management of harmonic propagation in a marine vessel by use of optimization.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Moltoni, Duilio;
Fascendini, G.;
Suul, Jon Are Wold;
Faranda, R.;
Undeland, Tore Marvin.
(2008)
Investigation on the Role of Power Electronic Controlled Constant Power Loads for Voltage Support in Distributed AC Systems.
Vitenskapelig kapittel
-
Mandelli, Stefano;
Merlo, Marco;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2015)
Electri-Mechanical Model for Understanding the Operation and Dynamic Behavior of a Micro-Grid: a case study in Tanzania.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta.
(2010)
nnnnnn.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
EMD-Prony for Phasor Estimation in Harmonic and Noisy Condition.
Vitenskapelig kapittel
-
Leandro, Matteo;
Bianchi, Nicola;
Molinas Cabrera, Maria Marta;
Ummaneni, Ravindra Babu.
(2019)
Low Inductance Effects on Electric Drives using Slotless Permanent Magnet Motors: A Framework for Performance Analysis.
Vitenskapelig kapittel
-
Sjolte, Jonas;
Tjensvoll, G;
Molinas Cabrera, Maria Marta.
(2014)
Reliability Analysis of IGBT Inverter for Wave Energy Converter with Focus on Thermal Cycling.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Bergna Diaz, Gilbert;
Berne, E;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2014)
Frequency Scanning of Power Electronic-based Smart Grids: The Modular Multilevel Converter.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Vazquez, S;
Takaku, T;
Carrasco, J.M.;
Shimada, R;
Undeland, Tore Marvin.
(2005)
Improvement of Transient Stability Margin in Power Systems with Integrated Wind Generation Using a STATCOM: An Experimental Verificaton.
Vitenskapelig kapittel
-
Jelani, Nadeem;
Molinas Cabrera, Maria Marta.
(2014)
Power Quality Enhancement by Power Electronic Generation Interface under Non-Ideal Voltage Conditions.
Vitenskapelig kapittel
-
Tian, Bing;
Molinas Cabrera, Maria Marta;
Moen, Stig;
An, Qun-Tao.
(2020)
High dynamic speed control of the Subsea Smart Electrical Actuator for a Gas Production System.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Assessing the validity of a propose stability analysis method in a three phase system with constant power load.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Comparative study of the efficiency and power density of offshore WECS with three-phase AC-link.
Vitenskapelig kapittel
-
Zadeh, Mehdi Karbalaye;
Zahedi, Bijan;
Molinas Cabrera, Maria Marta;
Norum, Lars.
(2013)
Centralized Stabilizer for Marine DC Microgrid.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Optimized design of wind energy conversion systems with single-phase AC-link.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Ortega, Romeo;
Bergna, Gilbert;
Molinas Cabrera, Maria Marta;
Grino, Robert.
(2013)
Conditions for Existence of Equilibrium Points of Systems with Constant Power Loads.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2012)
Evaluation of Non-active Current Compensation in Smart Grids.
Vitenskapelig kapittel
-
Barrera-Cardenas, Rene Alexander;
Molinas Cabrera, Maria Marta.
(2012)
Comparative study of the converter efficiency and power density in offshore wind energy conversion system with single-phase transformer.
Vitenskapelig kapittel
-
Holtsmark, Nathalie;
Molinas Cabrera, Maria Marta.
(2012)
Loss comparison of matrix and back-to-back converters for offshore WECS.
Vitenskapelig kapittel
-
Toh, Chuen Ling;
Molinas Cabrera, Maria Marta;
Norum, Lars Einar.
(2011)
Regulated DC Link Voltage with Smaller DC Link Capacitor in Peng's Generalized Theory of Instantaneous Reactive Power.
Vitenskapelig kapittel
-
Cardenas, Rene Alexander Barrera;
Isobe, Takanori;
Molinas Cabrera, Maria Marta.
(2016)
Optimal Design of Air-Core Inductor for
Medium/High Power DC-DC Converters.
Vitenskapelig kapittel
-
Zeiner, Ingerid;
Suul, Jon Are Wold;
Marcos, Aldo;
Molinas Cabrera, Maria Marta.
(2014)
System design and load profile shaping for a Reverse Osmosis desalination plant powered by a stand-alone PV system in Pozo Colorado, Paraguay.
Vitenskapelig kapittel
-
Løtveit, Marte Wiig;
Suul, Jon Are Wold;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2014)
A study of biomass in a hybrid stand-alone Micro-Grid for the rural village of Wawashang, Nicaragua.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2013)
Evaluation of the system parameters degree of influence on the stability of a DC microgrid.
Vitenskapelig kapittel
-
Amin, Mohammad;
Zadeh, Mehdi Karbalaye;
Suul, Jon Are Wold;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta;
Fosso, Olav B.
(2014)
Stability analysis of interconnected AC power systems with multi-terminal DC grids based on the Cigré DC grid test system.
Vitenskapelig kapittel
-
Shad, Erwin Habibzadeh Tonekabony;
Moeinfard, Tania;
Molinas Cabrera, Maria Marta;
Ytterdal, Trond.
(2020)
A Power Efficient, High Gain and High Input Impedance Capacitively-coupled Neural Amplifier.
Vitenskapelig kapittel
-
Estala, Eleder Araneta;
Molinas Cabrera, Maria Marta;
Tedeschi, Elisabetta.
(2013)
A Modular Simulation Platform for Testing Hybrid DC/AC Future Grid Solutions for Remote Areas.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
Molinas Cabrera, Maria Marta;
Rodríguez, Pedro.
(2012)
Exploring the Range of Impedance Conditioning by Virtual Inductance for Grid Connected Voltage Source Converters.
Vitenskapelig kapittel
-
Stenwig, Håkon;
Soler, Andres;
Furuki, Junya;
Suzuki, Yoko;
Abe, Takashi;
Molinas, Marta.
(2022)
Automatic Sleep Stage Classification with Optimized Selection of EEG Channels.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Moltoni, Duilio;
Fascendini, Gabrielle;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Constant power loads in AC distribution systems: An investigation of stability.
Vitenskapelig kapittel
-
Makai, Likonge;
Molinas Cabrera, Maria Marta.
(2013)
Biogas – An Alternative Household Cooking Technique for Zambia.
Vitenskapelig kapittel
-
Sanchez Acevedo, Santiago;
Molinas Cabrera, Maria Marta.
(2011)
Modeling of Switching Power Interfaces for Smart-Grid Stability Studies.
Vitenskapelig kapittel
-
Soler, Andres;
Giraldo, Eduardo;
Lundheim, Lars Magne;
Molinas Cabrera, Maria Marta.
(2022)
Relevance-based Channel Selection for EEG Source Reconstruction: An Approach to Identify Low-density Channel Subsets.
Vitenskapelig kapittel
-
Suul, Jon Are Wold;
D'Arco, Salvatore;
Rodriguez, P;
Molinas Cabrera, Maria Marta.
(2015)
Extended stability range of weak grids with voltage source converters through impedance – conditioned grid synchronization.
Vitenskapelig kapittel
-
Amin, Mohammad;
Suul, Jon Are Wold;
D'Arco, Salvatore;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2015)
Impact of state-space modelling fidelity on the small-signal
dynamics of VSC-HVDC systems.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, E;
Egrot, P;
Vannier, J-C;
Molinas Cabrera, Maria Marta.
(2013)
Generalized ABC Frame Differential Current Control ensuring constant DC Power for Modular Multilevel Converters under Unbalanced Operation.
Vitenskapelig kapittel
-
Li, Chendan;
Molinas Cabrera, Maria Marta;
Fosso, Olav B;
Qin, Nan;
Zhu, Lin.
(2019)
A Data-driven Approach to Grid Impedance : Identification for Impedance-based Stability Analysis under Different Frequency Ranges.
Vitenskapelig kapittel
-
Ghadikolaei, Jalal Khodaparast;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2018)
Real Time Phasor Estimation based on Recursive Prony with Several Channels of One PMU.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Berne, Erik;
Egrot, Philippe;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2013)
Analysis of Modular Multilevel Converters under Unbalanced Grid Conditions with different Load Current Control Strategies and Lagrange-based Differential Current Control.
Vitenskapelig kapittel
-
Bergna, Gilbert;
Suul, Jon Are Wold;
Graces, Alejandro;
Berne, Erik;
Egrot, Philippe;
Arzande, Amir;
Vannier, Jean-Claude;
Molinas Cabrera, Maria Marta.
(2013)
Improving the Dynamics of Lagrange-based MMC Controllers by means of Adaptive Filters for Single-Phase Voltage, Power and Energy Estimation.
Vitenskapelig kapittel
-
Molinas Cabrera, Maria Marta;
Suul, Jon Are Wold;
Undeland, Tore Marvin.
(2008)
Torque transient alleviation in fixed speed wind generators by Indirect Torque Control with STATCOM.
Vitenskapelig kapittel
-
Føyen, Sjur;
Fosso, Olav B;
Zhang, Chen;
Molinas Cabrera, Maria Marta.
(2019)
Frequency Domain Modelling for Assessment of Hilbert and SOGI Based Single-Phase Synchronisation.
Vitenskapelig kapittel
-
Melby, Mathias;
Fosso, Olav B;
Molinas Cabrera, Maria Marta.
(2019)
Impact of Virtual Oscillator Control on the instantaneous properties of VSC output voltage in distorted island grids.
Vitenskapelig kapittel
Rapport
-
Molinas Cabrera, Maria Marta.
(2009)
Voltage Regulation by Loads: Reactive Power Ancillary Service in Distributed Systems: Analytical and Experimental Studies.
Japan Society for the Promotion of Science, Japan
Forskningsrapport
-
Tedeschi, Elisabetta;
Santos, M.;
Ricci, P;
Molinas Cabrera, Maria Marta;
Villate, J.
(2011)
Control Strategies for Grid Integration of Wave Energy Converters at the BIscay Marine Energy Platform.
EWTEC 2011,
Forskningsrapport
-
Bracco, Giovanni;
Giorcelli, Ermanno;
Mattiazzo, Giuliana;
Tedeschi, Elisabetta;
Molinas Cabrera, Maria Marta.
(2011)
Control Strategies for the ISWEC Wave Energy System.
EWTEC 2011
Forskningsrapport
-
Næss, Bjarne Idsøe;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2006)
Laboratory Tests of Ride Through for Doubly Fed Induction Generators.
Wind Power Conference
Forskningsrapport
-
Næss, Bjarne Idsøe;
Molinas Cabrera, Maria Marta;
Undeland, Tore Marvin.
(2006)
Explanation of Induction Machine with Wound Rotor, Voltage Drops at the Stator Terminals.
Nordic Wind Power
Forskningsrapport
-
Nysveen, Arne;
Molinas Cabrera, Maria Marta.
(2013)
Electric systems for Pumped Storage Plants.
SINTEF Energi AS
Forskningsrapport
-
Nysveen, Arne;
Molinas Cabrera, Maria Marta.
(2013)
Electric systems for Pumped Storage PlantsTechnology Evaluation.
SINTEF Energi AS
Forskningsrapport
-
Molinas Cabrera, Maria Marta;
Kulia, Geir;
Ram, Sumit Kumar.
(2016)
On wind Turbine failure detection from measurements of
phase currents: a permutation entropy approach.
Cornell University Library, arXiv.org
Forskningsrapport
Studentoppgave eller avhandling
-
Amin, Mohammad;
Molinas Cabrera, Maria Marta.
(2017)
Small-signal Stability Characterization of Interaction Phenomena between HVDC Systems and Wind Farms.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
-
Park, Daeseong;
Zadeh, Mehdi;
Molinas Cabrera, Maria Marta.
(2023)
Model-Based Design of Marine Hybrid Power Systems - With a case study of DC Grid Architecture and Control.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
-
Zadeh, Mehdi;
Molinas, Marta Maria Cabrera.
(2016)
Stability Analysis Methods and Tools for Power Electronics- Based DC Distribution Systems, Applicable to On-Board Electric Power Systems and Smart Microgrids.
Norges teknisk-naturvitenskapelige universitet
Doktoravhandling
Undervisning
Emner
Formidling
2025
-
KonferanseforedragShah, Chirag Ramgopal; Molinas Cabrera, Maria Marta. (2025) Characterizing Frequency Coupling For Accurate Impedance-based Stability Analysis Using Bode Plots In Power Converter Networks. 2025 Power Electronics Inter-Disciplinary Workshop
2024
-
ForedragSoler Guevara, Andres Felipe; Naas, Viktor; Giri, Amita; Molinas Cabrera, Maria Marta. (2024) EEG Source Imaging Enhances Motor Imagery Classification. 32nd European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning
2023
-
KonferanseforedragFløtaker, Simen; Soler, Andres; Molinas Cabrera, Maria Marta. (2023) Primary color decoding using deep learning on source reconstructed EEG signal responses. 45th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC)
-
KonferanseforedragMarthinsen, Anne Jo; Galtung, Ivar; Cheema, Amandeep; Sletten, Christian; Andreassen, Ida Marie; Sletta, Øystein; Soler, Andres; Molinas Cabrera, Maria Marta. (2023) Psychological stress detection with optimally selected EEG channel using Machine Learning techniques. Italian Workshop on Artificial Intelligence for Human-Machine Interaction (AIxHMI 2023)
-
KonferanseforedragFløtaker, Simen; Soler, Andres; Molinas Cabrera, Maria Marta. (2023) Decoding primary color responses in EEG signals with deep learning in the source space. 10th International BCI Meeting
-
KonferanseforedragUrdahl, Paal; Omsland, Vegard; Løkken, Sandra; Dokken, Mari; Soler, Andres; Molinas Cabrera, Maria Marta. (2023) Impact of Ocular Artifact Removal on EEG-Based Color Classification for Locked-In Syndrome BCI Communication. IV Latin American Workshop on Computational Neuroscience
-
KonferanseforedragSoler, Andres; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2023) EEG source imaging of hand movement-related areas: An evaluation of the reconstruction accuracy with optimized channels. The 16th International Conference on Brain Informatics 2023
-
KonferanseforedragUrdahl, Paal; Omsland, Vegard; Løkken, Sandra; Dokken, Mari; Molinas Cabrera, Maria Marta. (2023) Impact of Ocular Artifact Removal on EEG-Based Color Classification for Locked-In Syndrome BCI Communication. IV Latin American Workshop on Computational Neuroscience
-
KonferanseforedragVassbotn, Molly; Nordstrøm-Hauge, Iselin; Soler, Andres; Molinas Cabrera, Maria Marta. (2023) EEG-Based Alcohol Detection System for Driver Monitoring. IV Latin American Workshop on Computational Neuroscience
2022
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Impedance-Based Stability Analysis of Power Electronics Systems: concept and applications. Workshop of the IEEE Japan Chapter
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Evolution of EEG systems from high density to wearables: assessing the quality. The 24th Congress of Japan Human Brain Mapping Society, Special Lecture
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Impedance-Based Stability Analysis of Power Electronics Systems. TIA Power Electronics Summer School
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Impedance-Based Stability Analysis of Power Electronics Systems. Webinar for Nanjing University of Aeronautics and Astronautics
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Evolution of EEG systems from high density to wearables: opportunities for expansion. 1st Workshop on Artificial Intelligence for Human Machine Interaction
-
KonferanseforedragStenwig, Håkon; Soler, Andres; Furuki, Junya; Suzuki, Yoko; Abe, Takashi; Molinas, Marta. (2022) Automatic Sleep Stage Classification with Optimized Selection of EEG Channels. 21th IEEE International Conference on Machine Learning and Applications (ICMLA)
-
ForedragKumar, Mohit; Molinas Cabrera, Maria Marta. (2022) Human emotion recognition from EEG signals: model evaluation in DEAP and SEED datasets. 21st International Conference of the Italian Association for Artificial Intelligence
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2022) Brain Cybernetics. Cybernetics Introduction course Motivation Lecture
-
KonferanseforedragSoler, Andres; Giraldo, Eduardo; Lundheim, Lars Magne; Molinas Cabrera, Maria Marta. (2022) Relevance-based Channel Selection for EEG Source Reconstruction: An Approach to Identify Low-density Channel Subsets. 15th International Joint Conference on Biomedical Engineering Systems and Technologies
2021
-
ForedragMolinas Cabrera, Maria Marta. (2021) Smart technology for aging and disability: EEG-based Brain Computer Interfaces. Japan - Norway webinar Health, ageing population, welfare technology and use of emerging technologies in the future healthcare
-
KonferanseforedragFuruki, Junya; Drange, Ole; Soler, Andres; Suzuki, Yoko; Molinas Cabrera, Maria Marta; Abe, Takashi. (2021) Current sources of brain potentials before rapid eye movements during human REM sleep: A high-density electroencephalography study. Tsukuba Conference 2021
-
KonferanseposterFuruki, Junya; Drange, Ole; Soler, Andres; Molinas Cabrera, Maria Marta; Abe, Takashi. (2021) Estimating the source of the negative potential that occurs before rapid eye movement during REM sleep: Analysis of recordings using a high-density electroencephalography (EEG). 39th Annual Meeting of the Japanese Society for Physiological Psychology and Psychophysiology (JSPP)
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2021) At the convergence of electric power and electric brain networks: facing large scale complex systems. Meiji University Annual Special Lecture
-
Intervju
-
KonferanseforedragFuruki, Junya; Drange, Ole; Soler, Andres; Suzuki, Yoko; Molinas Cabrera, Maria Marta; Abe, Takashi. (2021) Decision making in uncertain situations: Effects on brain activity during REM sleep. The 82 Annual Meeting of the Japan Society of Physiological Anthropology
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2021) Introduction of my research at NTNU. Guest lecture at the International Institute of Integrative Sleep Medicine
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2021) Expanding the Horizon of EEG Applications. Guest Lecture at the Human Sleep Lab of Tsukuba University
-
Deltakelse i radio- eller TVCittanti, Elisa; Soler, Andres; Shad, Erwin; Moctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2021) FlexEEG, Technoport 2021 - Deep Tech Dugnad.
2020
-
KonferanseforedragPettersen, Martine F.; Fosso, Olav B; Garcia Rosa, Paula Bastos; Molinas Cabrera, Maria Marta. (2020) Effect of non-ideal power take-off on the electric output power of a wave energy converter under suboptimal control. RENEW 2020 4th International Conference on Renewable Energies Offshore
-
KonferanseforedragShad, Erwin Habibzadeh Tonekabony; Moeinfard, Tania; Molinas Cabrera, Maria Marta; Ytterdal, Trond. (2020) A Power Efficient, High Gain and High Input Impedance Capacitively-coupled Neural Amplifier. 2020 IEEE Nordic Circuits and Systems Conference (NorCAS)
-
KonferanseforedragNaderi, Kebria; Shad, Erwin Habibzadeh Tonekabony; Molinas Cabrera, Maria Marta; Heidari, Ali. (2020) A Power Efficient Low-noise and High Swing CMOS Amplifier for Neural Recording Applications. 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC)
-
KonferanseforedragNaderi, Kebria; Shad, Erwin Habibzadeh Tonekabony; Molinas Cabrera, Maria Marta; Heidari, Ali; Ytterdal, Trond. (2020) A Very Low SEF Neural Amplifier by Utilizing a High Swing Current-Reuse Amplifier. 2020 XXXV Conference on Design of Circuits and Integrated Systems (DCIS)
-
KonferanseforedragShad, Erwin Habibzadeh Tonekabony; Molinas Cabrera, Maria Marta; Ytterdal, Trond. (2020) A Low-power and Low-noise Multi-purpose Chopper Amplifier with High CMRR and PSRR. 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC)
-
KonferanseposterShad, Erwin Habibzadeh Tonekabony; Naderi, Kebria; Molinas Cabrera, Maria Marta. (2020) High Input Impedance Capacitively-coupled Neural Amplifier and Its Boosting Principle. High Input Impedance Capacitively-coupled Neural Amplifier and Its Boosting Principle
-
KonferanseforedragNaderi, Kebria; Shad, Erwin Habibzadeh Tonekabony; Molinas Cabrera, Maria Marta; Heidari, Ali. (2020) A Fully Tunable Low-power Low-noise and High Swing EMG Amplifier with 8.26 PEF. 2020 18th IEEE International New Circuits and Systems Conference (NEWCAS)
-
KonferanseforedragSoler Guevara, Andres Felipe; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2020) Low-Density EEG for Source Activity Reconstruction using Partial Brain Models. 13th International Joint Conference on Biomedical Engineering Systems and Technologies
-
KonferanseposterMoctezuma, Luis Alfredo; Soler Guevara, Andres Felipe; Shad, Erwin Habibzadeh Tonekabony; Torres-Garcia, Alejandro Antonio; Molinas Cabrera, Maria Marta. (2020) David versus Goliath: Low-density EEG unravels its power through adaptive signal analysis -- FlexEEG. 4th HBP Student Conference "On Interdisciplinary Brain Research"
-
KonferanseforedragTorres-Garcia, Alejandro Antonio; Moctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2020) Assessing the impact of idle state type on the identification of RGB color exposure for BCI. 13th International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS 2020)
-
KonferanseposterSoler Guevara, Andres Felipe; Moctezuma, Luis Alfredo; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2020) EEG channel-selection method based on NSGA-II for source localization. 4th HBP Student Conference "On Interdisciplinary Brain Research"
-
KonferanseforedragKhodaparast, Jalal; Fosso, Olav B; Molinas Cabrera, Maria Marta; Suul, Jon Are Wold. (2020) Stability Analysis of a Virtual Synchronous Machine-based HVDC Link by Gear's Method. ENERGYCON 2020 - 6th IEEE International Energy Conference
-
KonferanseforedragGarcia Rosa, Paula Bastos; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2020) Switching sequences for non-predictive declutching control of wave energy converters. 21st IFAC World Congress
-
KonferanseforedragGhadikolaei, Jalal Khodaparast; Fosso, Olav B; Molinas Cabrera, Maria Marta; Suul, Jon Are Wold. (2020) Stability Analysis of a Virtual Synchronous Machine-based HVDC Link by Gear's Method. 6th IEEE international energy conference
-
KonferanseposterTorres-Garcia, Alejandro Antonio; Moctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2020) Towards a BCI based on Color Exposure Recognition. 4th HBP Student Conference "On Interdisciplinary Brain Research"
-
KonferanseforedragTian, Bing; Molinas Cabrera, Maria Marta; Moen, Stig; An, Qun-Tao. (2020) High dynamic speed control of the Subsea Smart Electrical Actuator for a Gas Production System. 2020 IEEE International Conference on Industrial Technology (ICIT)
2019
-
KonferanseposterLi, Chendan; Molinas Cabrera, Maria Marta; Fosso, Olav B; Qin, Nan; Zhu, Lin. (2019) A Data-driven Approach to Grid Impedance Identification for Impedance-based Stability Analysis under Different Frequency Ranges. Powertech 2019
-
KonferanseforedragZhang, Chen; Molinas Cabrera, Maria Marta; Lyu, Jing; Zong, Haoxiang; Cai, Xu. (2019) Understanding the Nonlinear Behaviour and Synchronizing Stability of a Grid-Tied VSC Under Grid Voltage Sags. IET renewable power generation conference
-
KonferanseforedragTian, Bing; Molinas Cabrera, Maria Marta; Moen, Stig; An, Qun-Tao. (2019) Non-filter position sensorless control based on a α-β frame complex PI controller. IECON2019
-
KonferanseforedragZong, Haoxiang; Lyu, Jing; Zhang, Chen; Molinas Cabrera, Maria Marta; Cai, Xu; Rao, Fangquan. (2019) Modified sequence domain impedance modelling of the modular multilevel converter. IET renewable power generation conference
-
KonferanseforedragZong, Haoxiang; Lyu, Jing; Zhang, Chen; Cai, Xu; Molinas Cabrera, Maria Marta; Rao, Fangquan. (2019) Mimo impedance based stability analysis of DFIG-based wind farm with MMC-HVDC in modifed sequence domain. IET renewable power generation conference
-
KonferanseposterSoler Guevara, Andres Felipe; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2019) Partial Brain Model For real-time classification of RGB visual stimuli: A brain mapping approach to BCI. 8th Graz Brain Computer Interface Conference 2019, Bridging Science and Application.
-
KonferanseforedragSoler Guevara, Andres Felipe; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2019) DYNLO: Enhancing Non-linear Regularized State Observer Brain Mapping Technique by Parameter Estimation with Extended Kalman Filter. 7th International Work-Conference on Bioinformatics and Biomedical Engineering
-
KonferanseforedragShad, Erwin Habibzadeh Tonekabony; Molinas Cabrera, Maria Marta; Ytterdal, Trond. (2019) Modified Current-reuse OTA to Achieve High CMRR by utilizing Cross-coupled Load. 2019 15th Conference on Ph.D Research in Microelectronics and Electronics (PRIME)
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2019) Impedance-based Stability Evaluation of power electronics dominated power systems. IEEE PELS-IES Delhi Chapters Distinguished Lecture
-
KonferanseforedragTorres-Garcia, Alejandro Antonio; Molinas Cabrera, Maria Marta. (2019) Analyzing the Recognition of Color Exposure and Imagined Color from EEG signals. International Conference on BioInformatics and BioEngineering (IEEE BIBE 2019)
-
KonferanseforedragGasca, Maria Victoria; Garces, Alejandro; Molinas Cabrera, Maria Marta. (2019) Stability Analysis of the Proportional-Resonant Controller in Single Phase Converters. 2019 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA)
-
KonferanseforedragMoctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2019) Sex differences observed in a study of EEG of linguistic activity and resting-state: Exploring optimal EEG channel configurations. 2019 7th International Winter Conference on Brain-Computer Interface (BCI)
-
KonferanseforedragCorigliano, Silvia; Mocecchi, Matteo; Mirbagheri, Mina; Merlo, Marco; Molinas Cabrera, Maria Marta. (2019) Microgrid design: sensitivity on models and parameters. 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe)
-
KonferanseforedragTorres-García, Alejandro Antonio; Molinas Cabrera, Maria Marta. (2019) Analyzing the Recognition of Color Exposure and Imagined Color from EEG Signals. 19th IEEE International Conference on Bioinformatics and Bioengineering, BIBE 2019
-
KonferanseforedragMoctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2019) Event-related potential from EEG for a two-step Identity Authentication System. IEEE International Conference on Industrial Informatics, INDIN’19
-
KonferanseforedragTorres-Garcia, Alejandro Antonio; Moctezuma, Luis Alfredo; Åsly, Sara Hegdahl; Molinas Cabrera, Maria Marta. (2019) Discriminating between color exposure and idle state using EEG signals for BCI application. The 7th IEEE International Conference on E-Health and Bioengineering - EHB 2019
-
KonferanseforedragÅsly, Sara Hegdahl; Moctezuma, Luis Alfredo; Gilde, Monika; Molinas Cabrera, Maria Marta. (2019) Towards EEG-based signals classification of RGB color-based stimuli. 8th Graz Brain-Computer Interface Conference 2019
2018
-
KonferanseforedragFosso, Olav B; Molinas Cabrera, Maria Marta. (2018) EMD Mode Mixing Separation of Signals with Close Spectral Proximity in Smart Grids. 2018 IEEE PES ISGT Europe - 8th IEEE PES Innovative Smart Grid Conference
-
KonferanseforedragGhadikolaei, Jalal Khodaparast; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2018) EMD-Prony for Phasor Estimation in Harmonic and Noisy Condition. 24th IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion - SPEEDAM 2018
-
KonferanseforedragMoctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2018) Towards an API for EEG-Based Imagined Speech classification. International conference on Time Series and Forecasting
-
KonferanseforedragMoctezuma, Luis Alfredo; Molinas Cabrera, Maria Marta. (2018) EEG-based Subjects Identification based on Biometrics of Imagined Speech using EMD. The 11th International Conference on Brain Informatics (BI 18)
-
KonferanseforedragGhadikolaei, Jalal Khodaparast; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2018) Real Time Phasor Estimation based on Recursive Prony with Several Channels of One PMU. 2018 IEEE PES ISGT Europe - 8th IEEE PES Innovative Smart Grid Conference
-
KonferanseforedragGhadikolaei, Jalal Khodaparast; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2018) Efficient Phasor Estimation under Steady State and Dynamic Conditions. SEST 2018 - International Conference of Smart Energy Systems and Technologies
-
KonferanseforedragGhadikolaei, Jalal Khodaparast; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2018) Phasor Estimation based on Modified Recursive Prony. 2nd IEEE Conference on Control Technology and Applications - IEEE CCTA 2018
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2018) Stability of Power Electronics Converters from the perspective of the Synchronous Machine. IEEE Power Electronics Colombian Chapter Lecture Series
-
KonferanseforedragGarcia Rosa, Paula Bastos; Ringwood, John V.; Fosso, Olav B; Molinas Cabrera, Maria Marta. (2018) Comparison of frequency estimation methods for wave energy control. arXiv:1804.02247v1 [cs.SY]
-
KonferanseforedragLiu, Jinghong; Zhou, Lin; Molinas Cabrera, Maria Marta. (2018) Impact of Digital Time Delay on the Stable Grid Hosting Capacity of Large-scale Centralized Photovoltaic Plant. ArXiv pre-print open repository
-
ForedragMolinas Cabrera, Maria Marta. (2018) The Journey to my dream: from Astronomy to Electrical Engineering and more. IEEE International Power Electronics Conference, IPEC 2018
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2018) Impedance based analysis of interconnected power electronics system: Impedance operator and partition points. IEEE Workshop on Representations of Power Electronics for Grid Dynamic Studies
-
KonferanseforedragZhang, Chen; Molinas Cabrera, Maria Marta; Rygg, Atle; Cai, Xu. (2018) Understanding the Nonlinear Behavior and Frequency Stability of a Grid-synchronized VSC Under Grid Voltage Dips. Arxiv paper June 2018
-
KonferanseforedragZhang, Chen; Molinas Cabrera, Maria Marta; Cai, Xu; Rygg, Atle. (2018) Impedance Network of Interconnected Power Electronics Systems: Impedance Operator and Stability Criterion. Arxiv paper Nov 2018
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2018) Impedance-Based Stability Evaluation of Virtual Synchronous Machine Implementations in Converter Controllers. IEEE 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia)
2017
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta; Unamuno, Eneko; Chen, Zhang; Cai, Xu. (2017) A simple method for shifting local dq impedance models to a global reference frame for stability analysis. e-print Cornell University Library open respository arXiv:1706.08313
-
KonferanseforedragGarcia-Rosa, Paula; Kulia, Geir; Ringwood, John V.; Molinas Cabrera, Maria Marta. (2017) Real-Time Passive Control of Wave Energy Converters Using the Hilbert-Huang Transform. 20th IFAC World Congress
-
ForedragMolinas Cabrera, Maria Marta; Kulia, Geir; Bjørge, Lars-Erik; Emaus, Trond Huberts. (2017) Demonstration "Frying a drone with your mind". Technoport 2017 – The Human Factor
-
ForedragMolinas Cabrera, Maria Marta. (2017) IE Faculty Introduction Seminar for PhD students. PhD Introduction Seminar 2017
-
AviskronikkMolinas Cabrera, Maria Marta; Monti, Antonello. (2017) The Marine Electrical Revolution: Battery Power at Sea.
-
KonferanseforedragLyu, Jing; Cai, Xu; Molinas Cabrera, Maria Marta. (2017) Harmonic State Space Modeling of a Three-Phase Modular Multilevel Converter. e-pring Open Repository Cornell University arXiv:1706.09925 [cs.SY]
-
KonferanseforedragHillenbrand, Benedikt; Kulia, Geir; Molinas Cabrera, Maria Marta. (2017) Impact of Time Varying Angular Frequency on the Separation of Instantaneous Power Components in Stand-alone Power Systems. 2017 6th International Conference on Clean Electrical Power (ICCEP 2017)
-
KonferanseforedragFosso, Olav B; Molinas Cabrera, Maria Marta. (2017) Method for Mode Mixing Separation in Empirical Mode Decomposition. arXiv:1709.05547v1 [stat.ME] 16 Sep 2017
-
ForedragMolinas Cabrera, Maria Marta. (2017) Introduction of the Department of Engineering Cybernetics to the female students of the PhD Day organized by the NTNU ADA project. PhD Day - NTNU ADA Project
-
ForedragMolinas Cabrera, Maria Marta. (2017) Wave Energy at NTNU. 2017 Maynooth University Wave Energy Workshop
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta. (2017) Stabilitetsutfordringar i kraftelektronikk-dominerte distribusjonsnett. NEF Teknisk Møte 2017
-
KonferanseforedragKulia, Geir; Molinas Cabrera, Maria Marta; Lundheim, Lars Magne; Fosso, Olav B. (2017) Simple model for understanding harmonics propagation in single-phase microgrids. Clean Electrical Power (ICCEP), 2017 6th International Conference on
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta; Eneko, Unamuno; Zhang, Chen; Cai, Xu. (2017) A simple method for shifting local dq impedance models to a global reference frame for stability analysis. e-print Cornell University Library open respository. e-print Cornell University Library open respository arXiv: 1706.08313
-
KonferanseforedragZhang, Chen; Cai, Xu; Molinas Cabrera, Maria Marta; Rygg, Atle. (2017) Augmented Sequence Impedance Networks of Grid-tied Voltage Source Converter for Stability Analysis. Arxiv paper March 2017
-
KonferanseforedragBueno-Lopez, Maximiliano; Giraldo, Eduardo; Molinas Cabrera, Maria Marta. (2017) Analysis of Neural Activity from EEG Data based on EMD frequency bands. 24th IEEE International Conference on Electronics, Circuits and Systems (ICECS)
-
KonferanseforedragLyu, Jing; Molinas Cabrera, Maria Marta; Cai, Xu. (2017) Stabilization control methods for enhancing the stability of wind farm integration via an MMC-based HVDC system. 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG 2017)
-
KonferanseforedragAmin, Mohammad; Molinas Cabrera, Maria Marta. (2017) Non-parametric Impedance based Stability and Controller Bandwidth Extraction from Impedance Measurements of HVDC-connected Wind Farms. e-pring Open Repository Cornell University arXiv:1704.04800
-
KonferanseforedragChen, Zhang; Cai, Xu; Rygg, Atle; Molinas Cabrera, Maria Marta. (2017) Augmented Sequence Impedance Networks of Grid-tied Voltage Source Converter for Stability Analysis. e-pring Open Repository Cornell University arXiv:1703.03977
-
KonferanseforedragAmin, Mohammad; Molinas Cabrera, Maria Marta. (2017) Model Predictive Control of Voltage Source Converter in a HVDC System. e-pring Open Repository Cornell University arXiv:1704.04293
-
KonferanseforedragChen, Zhang; Cai, Xu; Rygg, Atle; Molinas Cabrera, Maria Marta. (2017) Accurate and reduced SISO Sequence Impedance Models of Grid-tied Voltage Source Converter for Small Signal Stability Analysis. e-pring Open Repository Cornell University arXiv:1704.04157
-
KonferanseforedragLyu, Jing; Qiang, Chen; Cai, Xu; Molinas Cabrera, Maria Marta. (2017) Impedance Analysis of Modular Multilevel Converter Based on Harmonic State-Space Modeling Method. e-pring Open Repository Cornell University arXiv:1705.01030
2016
-
IntervjuMolinas Cabrera, Maria Marta; Kulia, Geir; Fosso, Olav B; Lundheim, Lars Magne. (2016) An electrifying find can help with stability in the electric grid.
-
KonferanseforedragAmin, Mohammad; Rygg, Atle; Molinas Cabrera, Maria Marta. (2016) Impedance-based and Eigenvalue based Stability Assessment Compared in VSC-HVDC System. 8th Annual IEEE Energy Conversion Congress & Exposition (ECCE 2016)
-
ForedragBarrera-Cardenas, Rene Alexander; Isobe, Takanori; Molinas Cabrera, Maria Marta. (2016) Comparative study of semiconductor devices based on a meta-parameterised approach: SiC MOSFET vs Si IGBT technologies. Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), 2016 IEEE 8th International
-
KonferanseforedragAmin, Mohammad; Molinas Cabrera, Maria Marta. (2016) Self-synchronisation of wind farm in MMC-based HVDC system. Electrical Power and Energy Conference (EPEC), 2016 IEEE
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta; Cai, Xu; Chen, Zhang. (2016) Frequency-dependent source and load impedances in power systems based on power electronic converters. Power Systems Computation Conference (PSCC), 2016
-
ForedragMolinas Cabrera, Maria Marta. (2016) SJTU-NTNU Joint Workshop: Offshore Wind and Smart Grid Group. Shanghai Jiao-Tong University and NTNU Joint Workshop
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2016) PhD Candidates Seminar: Faculty of Information Technology and Electrical Engineering. NTNU IE PhD Seminar
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta. (2016) Real-time stability analysis of power electronic systems. Control and Modeling for Power Electronics (COMPEL), 2016 IEEE 17th Workshop on
-
Intervju
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2016) PhD Candidates and Supervisors Seminar: Quality in a Doctoral Work when Focusing on Time to Degree. PhD Candidates and Supervisors Seminar: University in Stavanger
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2016) PhD Candidates Seminar: NTNU Faculty of Information Technology and Electrical Engineering. NTNU IE PhD Seminar
-
KonferanseforedragKulia, Geir; Molinas Cabrera, Maria Marta; Lundheim, Lars Magne; Larsen, Bjørn B.. (2016) Towards a Real-time Measurement Platform for Microgrids in Isolated Communities. Humanitarian Technology: Science, Systems and Global Impact 2016
-
IntervjuMolinas Cabrera, Maria Marta; Kulia, Geir; Fosso, Olav B; Lundheim, Lars Magne. (2016) Oppdagelse kan sikre stabil strømforsyning.
-
KonferanseforedragKulia, Geir; Molinas Cabrera, Maria Marta; Lundheim, Lars Magne. (2016) Tool for detecting waveform distortions in inverter-based Microgrids: a validation study. IEEE GLOBAL HUMANITARIAN TECHNOLOGY CONFERENCE
-
KonferanseforedragRygg, Atle; Molinas Cabrera, Maria Marta; Zhang, Chen; Cai, Xu. (2016) Frequency-dependent source and load impedances in power systems based on power electronic converters. Power Systems Computation Conference (PSCC), 2016
2015
-
KonferanseforedragÅrdal, Atle Rygg; Molinas Cabrera, Maria Marta; Skjong, Espen. (2015) Handling system harmonic propagation in a diesel-electric ship with an active filter. 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS)
-
Intervju
-
Foredrag
-
Intervju
-
Intervju
-
Intervju
-
Intervju
-
Intervju
-
Intervju
-
Intervju
-
Intervju
-
IntervjuMolinas Cabrera, Maria Marta. (2015) TEK.no: Norske studenter styrer droner med hjernebølger Se videoen av NTNUs nye forskningsbragd.
2013
-
KonferanseforedragSee, Phen Chiak; Fosso, Olav B; Molinas Cabrera, Maria Marta; Foosnæs, Jan Andor. (2013) A Method for Optimizing the Offer Price of Collaborativ Power Generators. IEEE Powertech
-
KonferanseforedragAllard, Stephane; See, Phen Chiak; Molinas Cabrera, Maria Marta; Fosso, Olav B; Foosnæs, Jan Andor. (2013) Electric Vehicles Charging in a Smart Microgrid Supplied with Wind Energy. IEEE Powertech Grenoble 2013 - Towards carbon free society through smarter grids
-
ForedragBarrera-Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2013) WIND ENERGY CONVERSION SYSTEMS FOR DC-SERIES BASED HVDC TRANSMISSION. XV ERIAC - CIGRE
-
KonferanseposterBarrera-Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2013) Optimized Design of a Modular Power Converter Based on Medium Frequency AC-Link for Offshore DC Wind Park. NOWITECH DAY 2013
2012
-
KonferanseforedragTai, Vin Cent; See, Phen Chiak; Molinas Cabrera, Maria Marta. (2012) Control of the electric power take off for a point absorber wave energy converter. Technoport Conference 2012
-
KonferanseforedragTai, Vin Cent; See, Phen Chiak; Molinas Cabrera, Maria Marta. (2012) Sizing and control of the electric power take off for a buoy type point absorber wave energy converter. International Conference on Renewable Energies and Power Qualities ICREPQ'12
-
ForedragParseh, Reza; Sanchez Acevedo, Santiago; Kansanen, Kimmo; Molinas Cabrera, Maria Marta; Ramstad, Tor Audun. (2012) Real-Time Compression of Measurements in Distribution Grids. IEEE SmartGridComm 2012 Symposium– Network
-
ForedragBarrera-Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2012) Comparative Study of the Efficiency and Power Density of Offshore Wind Energy Conversion System based on High Frequency AC-Link. NWIN - FINLAND 2012
-
KonferanseforedragVatne, Åshild; Molinas Cabrera, Maria Marta; Foosnæs, Jan Andor. (2012) Analysis of a Scenario of Large Scale Adoption of Electrical Vehicles in Nord-Trøndelag. Technoport 2012
-
KonferanseforedragSee, Phen Chiak; Su, Vin Cent; Molinas Cabrera, Maria Marta. (2012) Ant colony optimization applied to control of ocean wave energy converters. Technoport 2012
-
KonferanseforedragTorres Olguin, Raymundo E.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2012) Hybrid HVDC connection of large offshore wind farms to the AC grid. IEEE International Symposium on Industrial Electronics (ISIE), 2012
-
KonferanseposterBarrera-Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2012) Optimization of the Design process of Wind Energy Conversion System with Single-Phase AC-Link. NOWITECH Day 2012
2011
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2011) Offshore wind farm research: Quo Vadis?. NOWITECH Wind Seminar 2011
-
ForedragMolinas Cabrera, Maria Marta. (2011) Building bridges for research cooperation: NTNU-AIST 2006-2010. AIST-SINTEF/NTNU Workshop 2011: Energy System of the Future
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas Cabrera, Maria Marta. (2011) A control strategy for series connected offshore wind turbines. 9th IEEE International conference on power electronics and drives systems
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas Cabrera, Maria Marta. (2011) A flexible and optimal power theory for reactive power compensation in ABC frame. PowerTech2011
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas Cabrera, Maria Marta. (2011) Optimal control of a reduced matrix converter for offshore wind parks. PowerTech2011
-
KonferanseposterSee, Phen Chiak; Su, Vin Cent; Molinas Cabrera, Maria Marta. (2011) A bio-inspired approach to determine the control parameter of the point absorber WEC in heave. NUIM Wave Energy Workshop 2011. Maynooth, Ireland. October 25, 2011
-
KonferanseforedragTorres Olguin, Raymundo E.; Undeland, Tore Marvin; Molinas Cabrera, Maria Marta. (2011) A direct power control for Hybrid HVDC transmission systems. IEEE PES Trondheim PowerTech 2011
-
KonferanseposterSanchez Acevedo, Santiago; Molinas Cabrera, Maria Marta. (2011) Power Electronics Modeling Fidelity: Impact on Stability Estimate of Micro-grid Systems. IEEE PES Conference on Innovative Smart Grid Technology, Asia (ISGT2011) (ISBN:978-1-4577-0874-9)
-
KonferanseposterSanchez Acevedo, Santiago; Molinas Cabrera, Maria Marta; Garces Ruiz, Alejandro. (2011) A current-coupled topology for grid integration of wind turbines in micro-grids. Indian Week- NTNU, Trondheim
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2011) Sensitivity of WEC control to the real sea condition and its impact on an all-electric PTO. NUI Maynooth Ocean Energy Workshop 2011
-
KonferanseposterBarrera Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2011) Performance Space of Wind Energy Conversion Systems by Regression Curve Losses. NOWITECH Day 2011
-
KonferanseposterBarrera-Cardenas, Rene Alexander; Molinas Cabrera, Maria Marta. (2011) Smart control wind turbine for MPPT based on LQG methodology. India 2011 NTNU
-
KonferanseposterSanchez Acevedo, Santiago; Molinas Cabrera, Maria Marta. (2011) Modeling of Switching Power Interfaces for Smart-Grid Stability Studies. Innovative Smart Grid Technologies IEEE PES ISGT 2011 Europe (ISBN: 978-1-4577-1422-1)
2010
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas, Marta. (2010) Comparative Investigation of Losses in a Reduced Matrix Converter for Off-Shore Wind Turbines. 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010)
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2010) Renewable Energy Research at NTNU with Emphsys on Wave Energy. Invited Lecture at Meiji University
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas, Marta. (2010) High Frequency Wind Energy Conversion from the Ocean. Internatinal Power Electronics Conference ECCE Asia
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2010) Renewable Energy: targets in Europe and Research at NTNU. Special lecture at Yokohama National University, Japan
-
KonferanseposterTorres Olguin, Raymundo E.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2010) Hybrid HVDC using in a Offshore Wind Farm Applications. Wind Power R&D seminar 2010 - deep sea offshore wind
-
KonferanseforedragTorres Olguin, Raymundo E.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2010) A controller for hybrid HVDC using in a off shore wind farm applications. EPE Wind Energy Chapter – 3rd Seminar
-
KonferanseforedragTorres Olguin, Raymundo E.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2010) A model-based controller in rotating reference frame for Hybrid HVDC. Energy Conversion Congress and Exposition (ECCE), 2010 IEEE
-
KonferanseposterGarces Ruiz, Alejandro; Molinas, Marta. (2010) Reduced Matrix Converter for Off-Shore Wind Farm Applications. Wind Power R&D seminar – deep sea offshore wind
-
KonferanseforedragTedeschi, Elisabetta; Ricci, Pierpaolo; Santos, Maider; Molinas, Marta; Martin, Jose Luis. (2010) "Control Strategies of a Wave Energy Converter for Power Quality Improvement". Renewable Energy Research Conference 2010
-
KonferanseforedragGarces Ruiz, Alejandro; Tedeschi, Elisabetta; Verez, Guillaume; Molinas, Marta. (2010) Power Collection Array for Improved Wave Farm Output based on Reduced Matrix Converters. 12th IEEE Workshop on Control and Modeling for Power Electronics (COMPEL 2010)
-
KonferanseforedragGarces Ruiz, Alejandro; Molinas, Marta. (2010) Impact of Operation Principle on the Losses of a Reduced Matrix Converter for Offshore Wind Parks. Proceedings of the 2010 IEEE International Symposium on Industrial Electronics
-
KonferanseforedragTorres Olguin, Raymundo E.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2010) A controller in D-Q synchronous reference frame for hybrid HVDC transmission system. 2010 International Power Electronics Conference - ECCE Asia -, IPEC 2010
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2010) Wind Energy Conversion Systems: Facing the Challenges of Offshore Grids. NEF Vårmøte 2010
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2010) New Converter Topologies for Offshore Wind Farms: State of the Research. Wind Power R&D Seminar: deep sea offshore
2009
-
KonferanseforedragJafar, Muhammad; Molinas Cabrera, Maria Marta. (2009) Ride-Through Enhancement of Line-Commutated HVDC Link for Large Offshore Wind Parks. The 35th Annual Conference of the IEEE Industrial Electronics Society IECON 2009
-
KonferanseforedragTorres Olguin, Raymundo E.; Undeland, Tore Marvin; Molinas Cabrera, Maria Marta. (2009) Hybrid HVDC Transmission Systems for Offshore Wind Farms. 5th PhD Seminar on Wind Energy in Europe
-
KonferanseposterJafar, Muhammad; Molinas Cabrera, Maria Marta. (2009) Improvement in Reactive Power Consumption of Line Commutated HVDC Converters for Integration of Offshore Wind-Power. 8th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Farms
-
KonferanseforedragGarces, Ruiz Alejandro; Molinas Cabrera, Maria Marta. (2009) Electrical Conversion System for Offshore Wind Turbines Based on High Frequency AS Link. EVER09
-
KonferanseforedragGarces, Ruiz Alejandro; Molinas Cabrera, Maria Marta. (2009) Cluster Interconnection of Offshore Wind Farms Using Direct AC High Frequency Links. 8th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Farms
-
KonferanseforedragMolinas Cabrera, Maria Marta; Kondoh, Junji. (2009) Power Electronic Loads as Providers of Reactive Power Ancillary Service to the Grid: Analytical and Experimental Study. 13th European Conference on Power Electronics and Applications
-
Konferanseforedrag
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2009) Conversion System Challenges for Large Scale Integration of Wind Power: Offshore Solutions. Second Annual Symposium on Grid Integration of Wind Power, Vestas Power Programme
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2009) Part I: Power Electronics for the Integration of Renewable Energy Sources. Sminar on Renewable Energies at the University of Alcala de Henares
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2009) State of the Art-Research: what is happening in technology development of power electronics in relation to wind power?. Tekna Vidkraft Seminar: Vindkraft fra a til å
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2009) Challenges and Opportunities for Power Electronics in the Integration of Distributed Energy Systems. Seminar on Power Electronics in Power Systems
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2009) Part II: Conversion System Topologies for Offshore Wind Park Installations. Seminar on Renewable Energies at University of Alacala de Henares
2008
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2008) The Role of Power Electronics in Distributed Energy Systems. The 5th AIST Symposium on Distributed Energy Systems in Tokyo
-
KonferanseforedragSkjervheim, Ottar; Sørby, Bernt; Molinas Cabrera, Maria Marta. (2008) Wave Energy Conversion: All Electric Power Take Off for a Direct Coupled Point Absorber. 2nd International Conference on Ocean Energy, ICOE2008
-
KonferanseforedragSuul, Jon Are Wold; Molinas Cabrera, Maria Marta; Norum, Lars Einar; Undeland, Tore Marvin. (2008) Tuning of Control Loops for Grid Connected Voltage Source Converters. PECon 2008 - The Second IEEE International Power & Energy Conference
-
KonferanseforedragMolinas Cabrera, Maria Marta; Suul, Jon Are Wold; Undeland, Tore Marvin. (2008) Torque Transient Alleviation in Fixed Speed Wind Generators by Indirect Torque Control with STATCOM. EPE-PEMC 2008
-
KonferanseforedragBajracharya, Chandra; Molinas Cabrera, Maria Marta; Suul, Jon Are Wold; Undeland, Tore Marvin. (2008) Understanding of Tuning Techniques of Converter Controllers for VSC-HVDC. NORPIE 2008
-
KonferanseforedragHaileselassie, Temesgen M.; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2008) Multi-Terminal VSC-HVDC System for Integration of Offshore Wind Farms and Green Electrification of Platforms in the North Sea. NORPIE 2008
-
KonferanseforedragMogstad, Anne Berit; Molinas Cabrera, Maria Marta. (2008) Power Collection and Integration on the Electric Grid from Offshore Wind Parks. NORPIE 2008
-
KonferanseforedragMolinas Cabrera, Maria Marta; Moltoni, Duilio; Fascendini, Gabrielle; Suul, Jon Are Wold; Undeland, Tore Marvin. (2008) Constant Power Loads in AC Distribution Systems: An Investigation of Stability. ISIE08
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2008) Integration of Wind Power Sources: A European perspective. 3rd Renewable Energy AIST International Symposium
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2008) Integration of wind power sources: A European Perspective. Renewable Energy 2008, Tokyo Fair
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2008) Offshore Wind Power from an European Perspective. Power Technology Seminar, Waseda University, Tokyo, Japan
-
KonferanseforedragMolinas Cabrera, Maria Marta. (2008) The Role of Power Electronics in Distributed Energy Systems. 5th AIST Symposium in Distributed Energy Systems 9th December 2008, Tokyo
2007
-
KonferanseposterMolinas Cabrera, Maria Marta; Suul, Jon Are Wold; Undeland, Tore Marvin. (2007) A Simple Method for Analytical Evaluation of LVRT in Wind Energy for Induction Generators with STATCOM or SVC. EPE 2007
-
KonferanseforedragMolinas Cabrera, Maria Marta; Skjervheim, Ottar; Andreassen, Pål; Undeland, Tore Marvin; Hals, Jørgen; Moan, Torgeir; Sørby, Bernt. (2007) Power Electronics as Grid Interface for Actively Controlled Wave Energy Converters. ICCEP 2007
-
KonferanseforedragMolinas Cabrera, Maria Marta; Suul, Jon Are Wold; Undeland, Tore Marvin. (2007) Improved Grid Interface of Induction Generators for Renewable Energy by use of STATCOM. ICCEP 2007
-
KonferanseforedragMolinas Cabrera, Maria Marta; Skjervheim, Ottar; Sørby, Bernt; Andreassen, Pål; Lundberg, S.; Undeland, Tore Marvin. (2007) Power Smoothing by Aggregation of Wave Energy Converters for Minimizing Electrical Energy Storage Requirements. Proceedings of the 7th European Wave and Tidal Energy Conference 2007, Porto, Portugal, 2007
2006
-
KonferanseforedragTakaku, T; Wiik, Jan; Igarashi, Seiki; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin; Uchida, Yoshiyuki; Shimada, R. (2006) Development of Novel Power Conversion System using MERS to Improve a Wind turbine Generator. Power Electronics Intelligent Motion Power Quality - PCIM 2006
-
KonferanseforedragMolinas Cabrera, Maria Marta; Gertmar, Lars; Undeland, Tore Marvin. (2006) Power Flow Control Technologies for Wind Power. Nordic Workshop on Power and Industrial Electronics
-
KonferanseforedragTakaku, Taku; Takaku, T; Igarashi, Seiki; Wiik, Jan; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2006) Improved Wind Power Conversion System Using Magnetic Energy Recovery Switch (MERS). Renewable Energy Conference 2006
-
KonferanseposterKondoh, Junji; Molinas Cabrera, Maria Marta; Yamaguchi, Hiroshi; Undeland, Tore Marvin. (2006) Cooperative Control for Voltage Regulation with Wind Generation. Renewable Energy Conference 2006
-
KonferanseforedragMolinas Cabrera, Maria Marta; Kondoh, Junji; Suul, Jon Are Wold; Suul, Jon Are; Undeland, Tore Marvin. (2006) Reactive Support for Wind and Wave Farms with a Statcom for Integration into the Power System. Renewable Energy Conference 2006
-
KonferanseforedragMolinas Cabrera, Maria Marta; Undeland, Tore Marvin. (2006) An Electrical Machine Approach to Power Flow Control in Power Systems with Wind Integration. Electrical Machines ICEM 2006
-
KonferanseforedragChicco, Gianfranco; Molinas Cabrera, Maria Marta; Undeland, Tore Marvin; Viglietti, Giovanni. (2006) Improvement of the transient stability margin in a wind system with Statcom. VI World Energy System Conference
-
KonferanseforedragMolinas Cabrera, Maria Marta; Suul, Jon Are Wold; Suul, Jon Are; Undeland, Tore Marvin. (2006) Wind Farms with increased transient stability margin provided by a STATCOM. IPEMC2006
2005
-
KonferanseforedragMolinas Cabrera, Maria Marta; Marvik, Jorun Irene; Undeland, Tore Marvin. (2005) Impact to Large Scale Integration of Wind Power into the Electricity Grid. International Conference of Women Engineers and Scientists
-
KonferanseforedragMolinas Cabrera, Maria Marta; Næss, Bjarne Idsøe; Gullvik, William; Undeland, Tore Marvin. (2005) Control of Wind Turbines with Induction Generators Interfaced to the Grid with Power Electronics Converters. IPEC 2005
-
KonferanseforedragMolinas Cabrera, Maria Marta; Vazquez, S; Takaku, T; Carrasco, J.M.; Shimada, R; Undeland, Tore Marvin. (2005) Improvement of Transient Stability Margin in Power Systems with Integrated Wind Generation Using a STATCOM: An Experimental Verification. Future Power System Conference 2005
-
KonferanseposterMolinas Cabrera, Maria Marta; Næss, Bjarne Idsøe; Gullvik, William; Undeland, Tore Marvin. (2005) Cage Induction Generators for Wind Turbines with Power Electronics Converters in the Light of the New Grid Codes. EPE 2005
-
KonferanseforedragHoff, Erik Stjernholm; Bergene, Håvard Huru; Molinas Cabrera, Maria Marta. (2005) A helix shaped wave machine. CA-OE Component Technology and Power Take-off
2001
-
KonferanseposterGarces Ruiz, Alejandro; Molinas, Marta. (2001) Series Connection of Offshore wind Turbines. Wind Power R&D seminar – deep sea offshore wind 2011