SoftICE members Robin T. Bye and Ibrahim A. Hameed will be presenting some recent research results on intelligent virtual prototyping of maritime winches in two scientific papers to be presented at the 31st European Conference on Modelling and Simulation (ECMS) 2017 in Budapest, Hungary, on 23–26 May. The papers are co-authored by the two abovementioned researchers together with SoftICE colleagues Ottar L. Osen and Webjørn Rekdalsbakken, as well as Birger Skogeng Pedersen (Mechatronics Lab, NTNU):
- Robin T. Bye, Ibrahim A. Hameed, Birger Skogeng Pedersen, and Ottar L. Osen. An intelligent winch prototyping tool. In Proceedings of the 31st European Conference on Modelling and Simulation (ECMS ’17), May 2017. Download pdf.
- Ibrahim A. Hameed, Robin T. Bye, Birger Skogeng Pedersen, and Ottar L. Osen. Evolutionary winch design using an online winch prototyping tool. In Proceedings of the 31st European Conference on Modelling and Simulation (ECMS ’17), May 2017. Download pdf.
A Prezi presentation of the first paper is available here:
The paper abstracts are provided at the end of this blog post.
Intelligent computer-automated design of cranes and winches
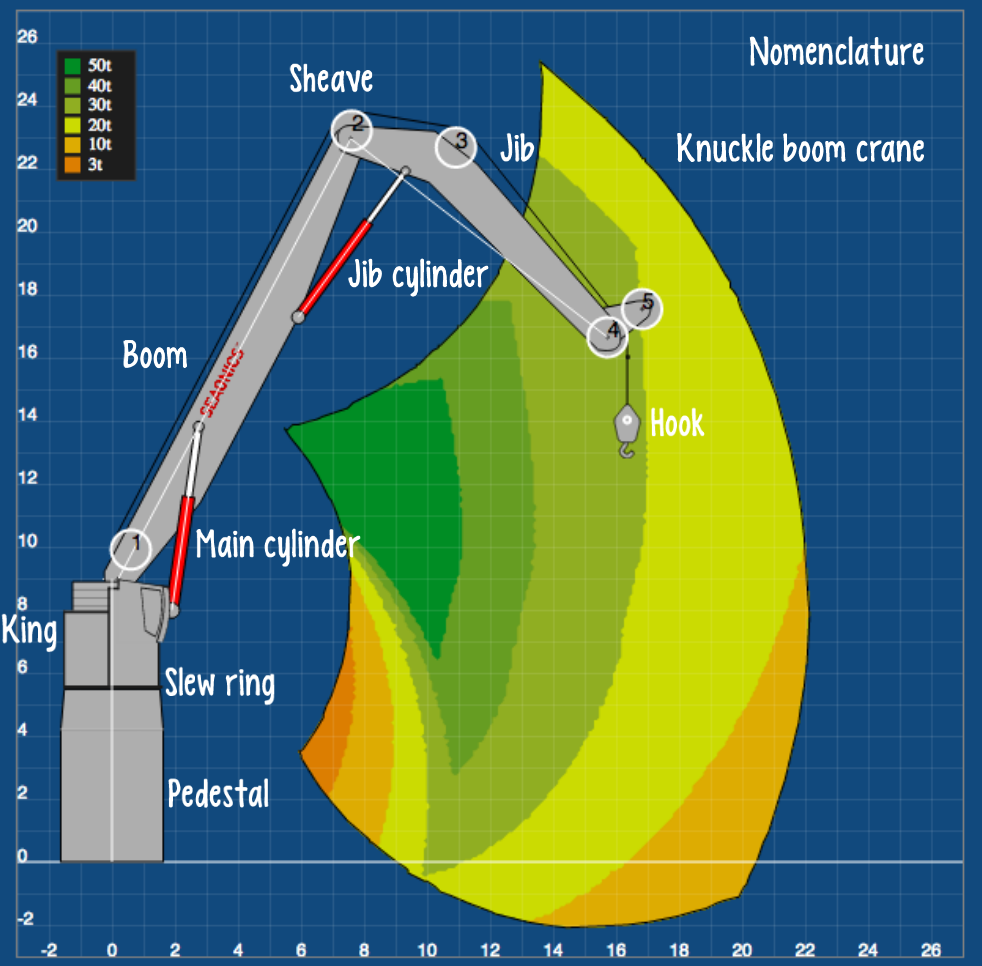
W build on our earlier work on intelligent computer-automated product design, where we have used methods from artificial intelligence (AI) such as genetic algorithms (GAs), particle swarm optimisation (PSO), and simulated annealing (SA) to optimise offshore crane design. Within a matter of only minutes, the algorithms were able to outperform the design of a real and delivered offshore crane with respect to some desired key performance indicators (KPIs). A human being would likely spend days or weeks to obtain the same results.
![]()
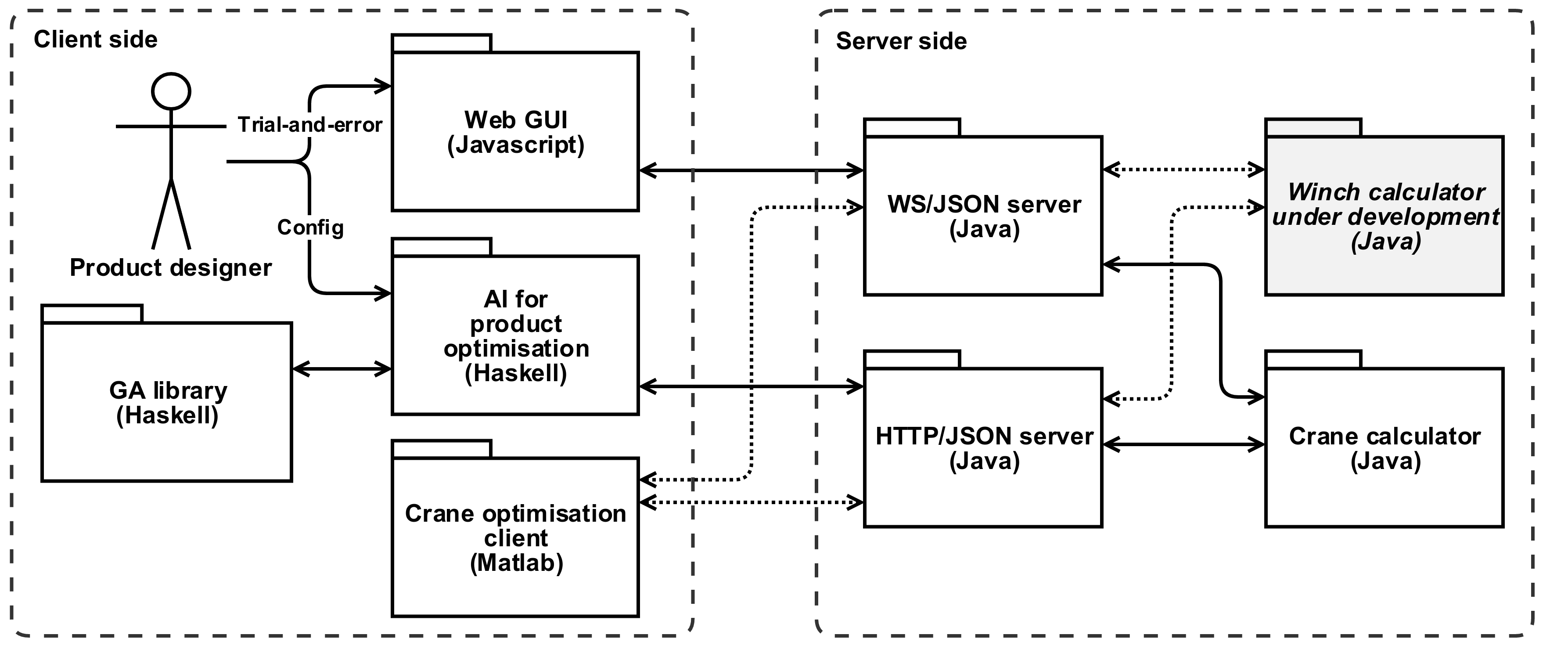
Here, we focus on an intelligent winch prototyping tool (WPT):
![]()
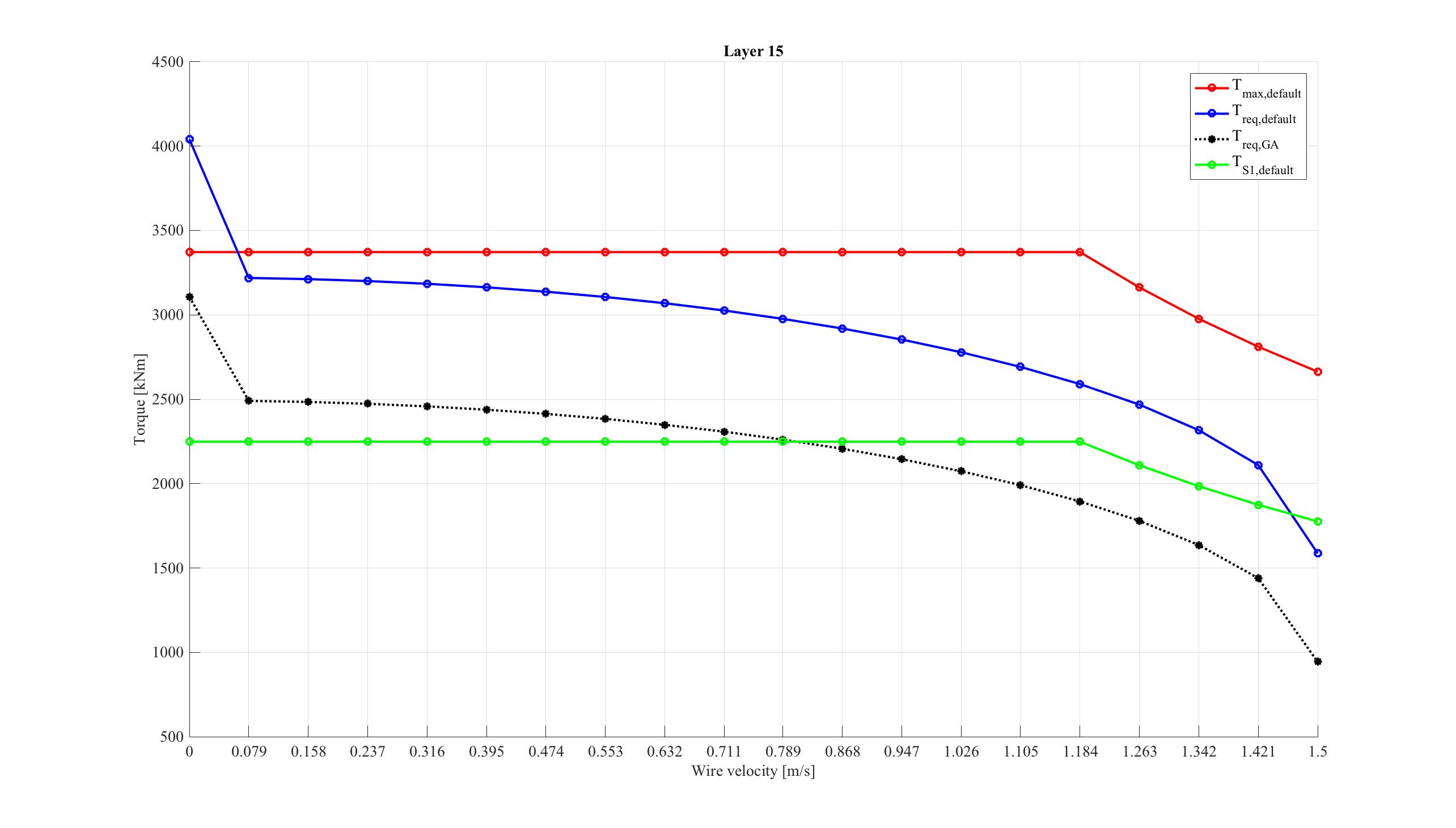
We perform several test with various algorithms and are able to optimize a set of winch design parameter values that yield winch designs with suitable torque profiles:
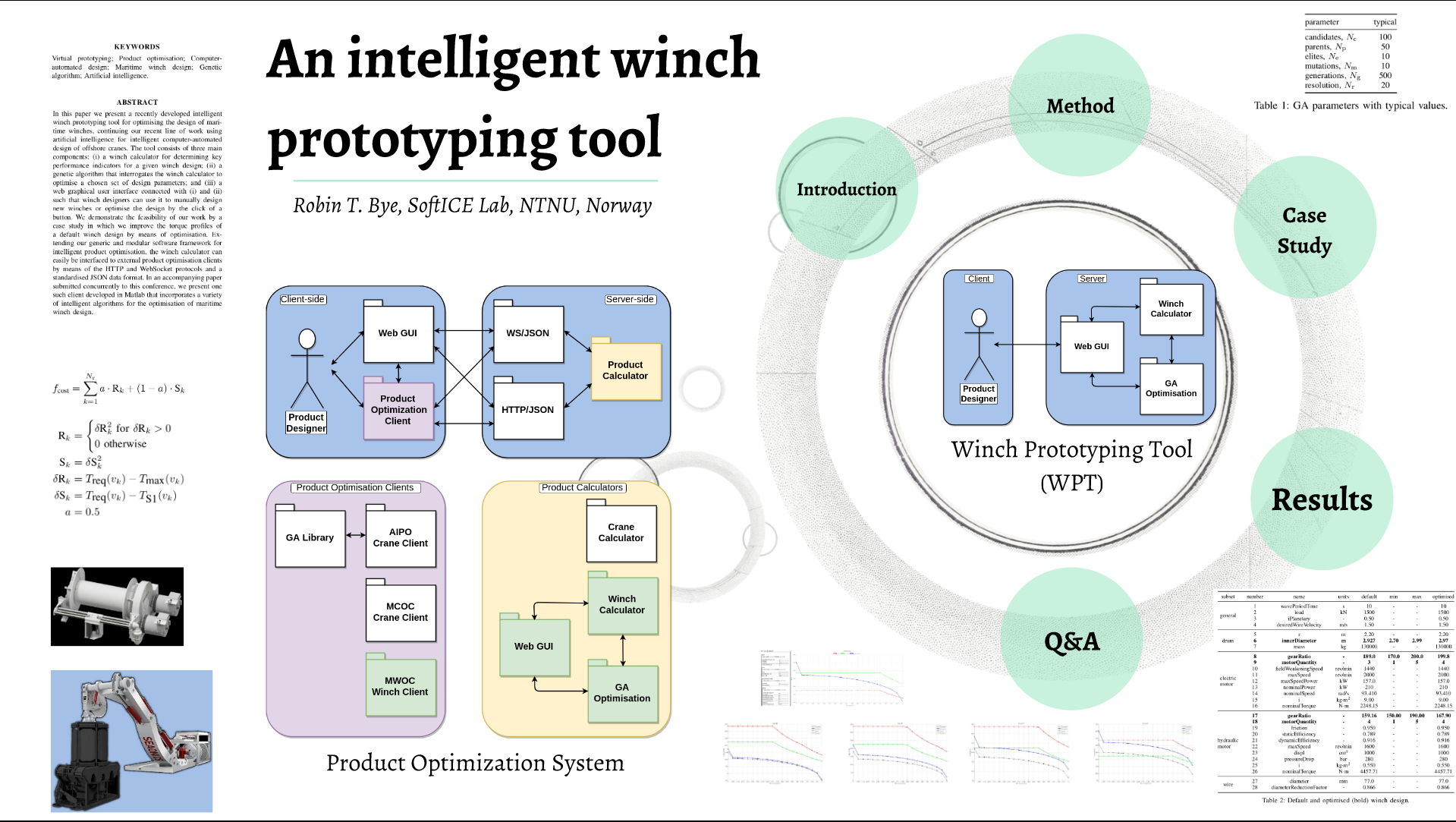
Abstract: An intelligent winch prototyping tool
In this paper we present a recently developed intelligent winch prototyping tool for ptimising the design of maritime winches, continuing our recent line of work using
artificial intelligence for intelligent computer-automated design of offshore cranes. The tool consists of three main components: (i) a winch calculator for determining key
performance indicators for a given winch design; (ii) a genetic algorithm that interrogates the winch calculator to optimise a chosen set of design parameters; and (iii) a web graphical user interface connected with (i) and (ii) such that winch designers can use it to manually design new winches or optimise the design by the click of a button. We demonstrate the feasibility of our work by a case study in which we improve the torque profiles of a default winch design by means of optimisation. Extending our generic and modular software framework for intelligent product optimisation, the winch calculator can easily be interfaced to external product optimisation clients by means of the HTTP and WebSocket protocols and a standardised JSON data format. In an accompanying paper submitted concurrently to this conference, we present one such client developed in Matlab that incorporates a variety of intelligent algorithms for the optimisation of maritime winch design.
Abstract: Evolutionary winch design using an online winch prototyping tool
This paper extends the work of a concurrent paper on an intelligent winch prototyping tool (WPT) that is part of a generic and modular software framework for intelligent computer-automated product design. Within this framework, we have implemented a Matlab winch optimisation client (MWOC) that connects to the WPT and employs four evolutionary optimisation algorithms to optimise winch design. The four algorithms we employ are (i) a genetic algorithm (GA), (ii) particle swarm optimisation (PSO), (iii) simulated annealing (SA), and (iv) a multi-objective optimisation genetic algorithm (MOOGA). Here, we explore the capabilities of MWOC in a case study where we show that given a set of design guidelines and a suitable objective function based on these guidelines, we are able to optimise a particular winch design with respect to some desired design criteria. Our research has taken place in close cooperation with two maritime industrial partners, Seaonics AS and ICD Software AS, through two innovation and research projects on applying artificial intelligence for intelligent computer-automated design of maritime equipment such as offshore cranes and maritime
winches.
More information
We have previously presented some details of our work on intelligent virtual prototyping of cranes and winches in earlier blog posts:
- 2016-06-13: Best Student Paper Award and Special Award at ECMS’16
- 2016-05-27: SoftICE presents intelligent virtual prototyping and mind control at ECMS 2016
- 2016-04-29: Seminar: A software framework for intelligent computer-automated product design
- 2015-05-06: Seminar: A Computer-automated Design Tool for Intelligent Virtual Prototyping of Offshore Cranes
- 2015-03-25: Paper on intelligent virtual prototyping of offshore cranes accepted for ECMS 2015
Acknowledgements
The SoftICE lab at NTNU in Ålesund wishes to thank ICD Software AS for their contribution in the software development process, and Seaonics AS for providing
documentation and insight into the design and manufacturing process of offshore cranes. We are also grateful for the support provided by Regionalt Forskningsfond
(RFF) Midt-Norge and the Research Council of Norway through the VRI research projects Artificial Intelligence for Crane Design (Kunstig intelligens for krandesign
(KIK)), grant no. 241238, and Artificial Intelligence for Winch Design (Kunstig intelligens for vinsjdesign (KIV)), grant no. 249171.
Collaboration?
Parties interested in research collaboration, testing our software, or more information are encouraged to contact us.
The SoftICE Lab